Other Parts Discussed in Thread: TDC1000, EVM430-FR6047, MSP430FR6047
Dear TI Team.
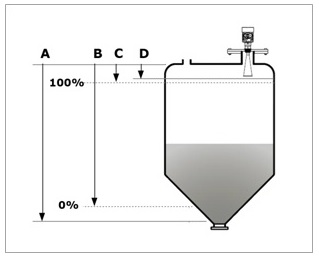
I am going to develop a flow level meter with Ultra Sonic.
I am reviewing the PGA460, but I would like to see if there is a history of design in the flow level measuring instrument.
And on the PGA460 there is no pin to sense the temperature of the ultrasonic transducers. Can you tell me how to implement it?
In TDC1000, pin is designed to detect the temperature of ultrasonic transducers with RTD pin.
Please let me know if there is another suitable solution.
Thanks.