Hi,
I am trying to do a project using AWR1642 board on Windows platform. I want to be able to configure the board using code so i can have same configuration settings and need not to reconfigure it every time i power up the board.
I modify code in path sdk\packages\ti\demo\xwr16xx\mmw and set config like below:
------
sensorStop
flushCfg
dfeDataOutputMode 1
channelCfg 15 3 0
adcCfg 2 1
adcbufCfg -1 0 0 1 0
profileCfg 0 77 438 7 48.98 0 0 15 1 256 6250 0 0 30
chirpCfg 0 0 0 0 0 0 0 1
chirpCfg 1 1 0 0 0 0 0 2
frameCfg 0 1 16 0 100 1 0
guiMonitor -1 1 0 0 0 0 0
cfarCfg -1 0 0 8 4 4 0 7510
cfarCfg -1 1 0 4 2 3 0 5120
peakGrouping -1 1 1 1 1 255
multiObjBeamForming -1 1 0.5
clutterRemoval -1 0
calibDcRangeSig -1 0 -5 8 256
extendedMaxVelocity -1 0
compRangeBiasAndRxChanPhase 0.0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0
measureRangeBiasAndRxChanPhase 0 1.5 0.2
sensorStart
------
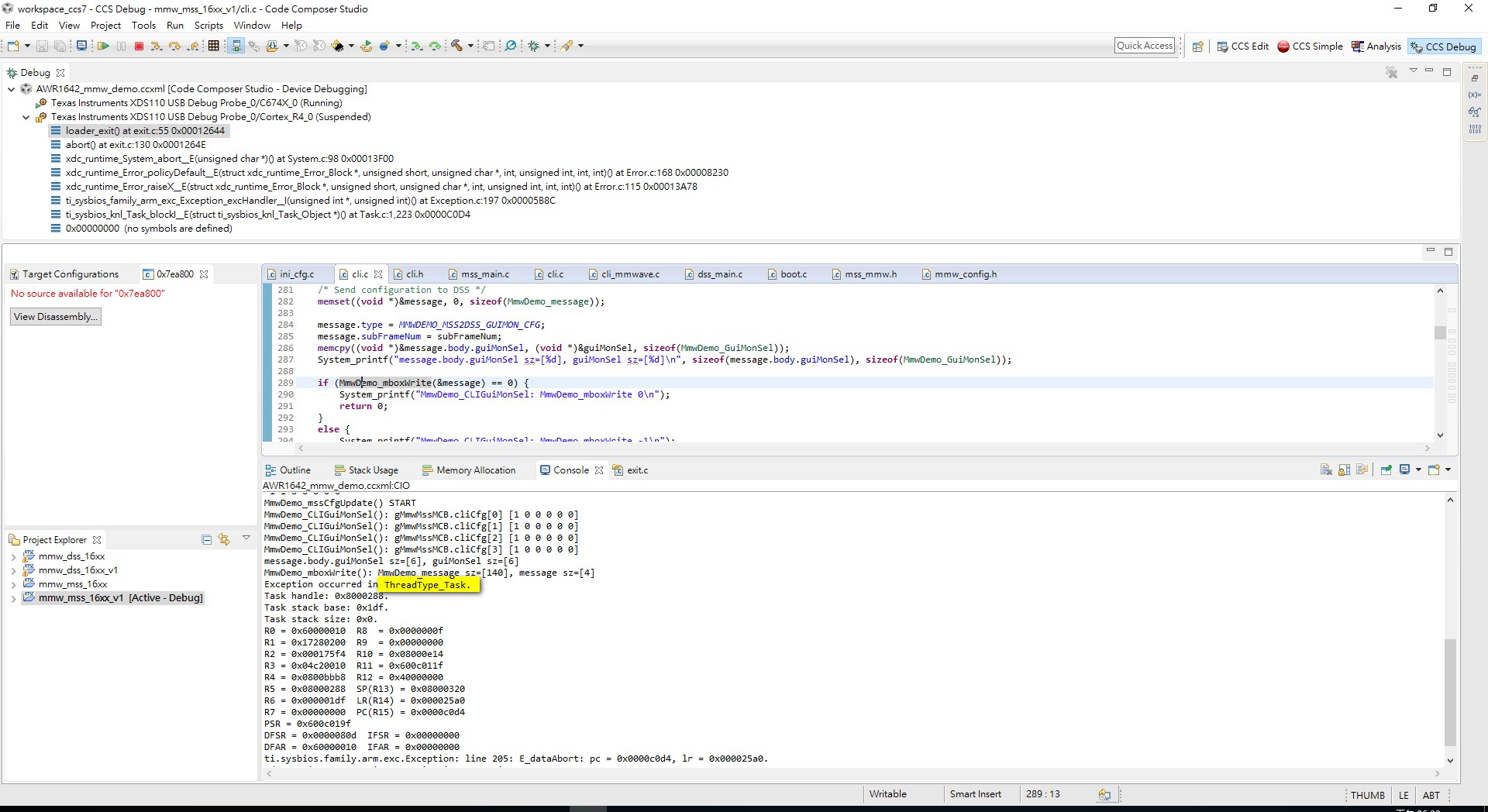
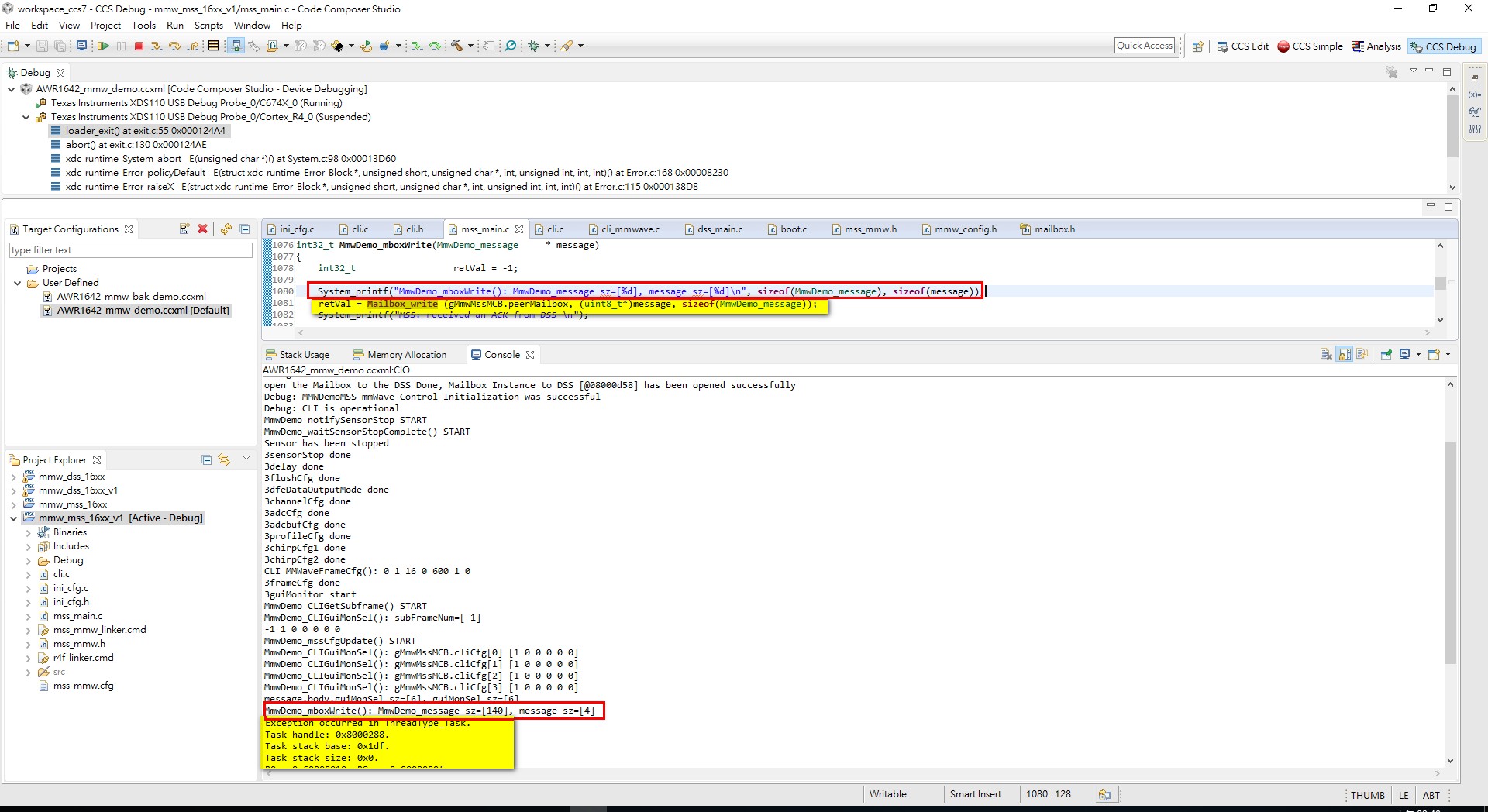
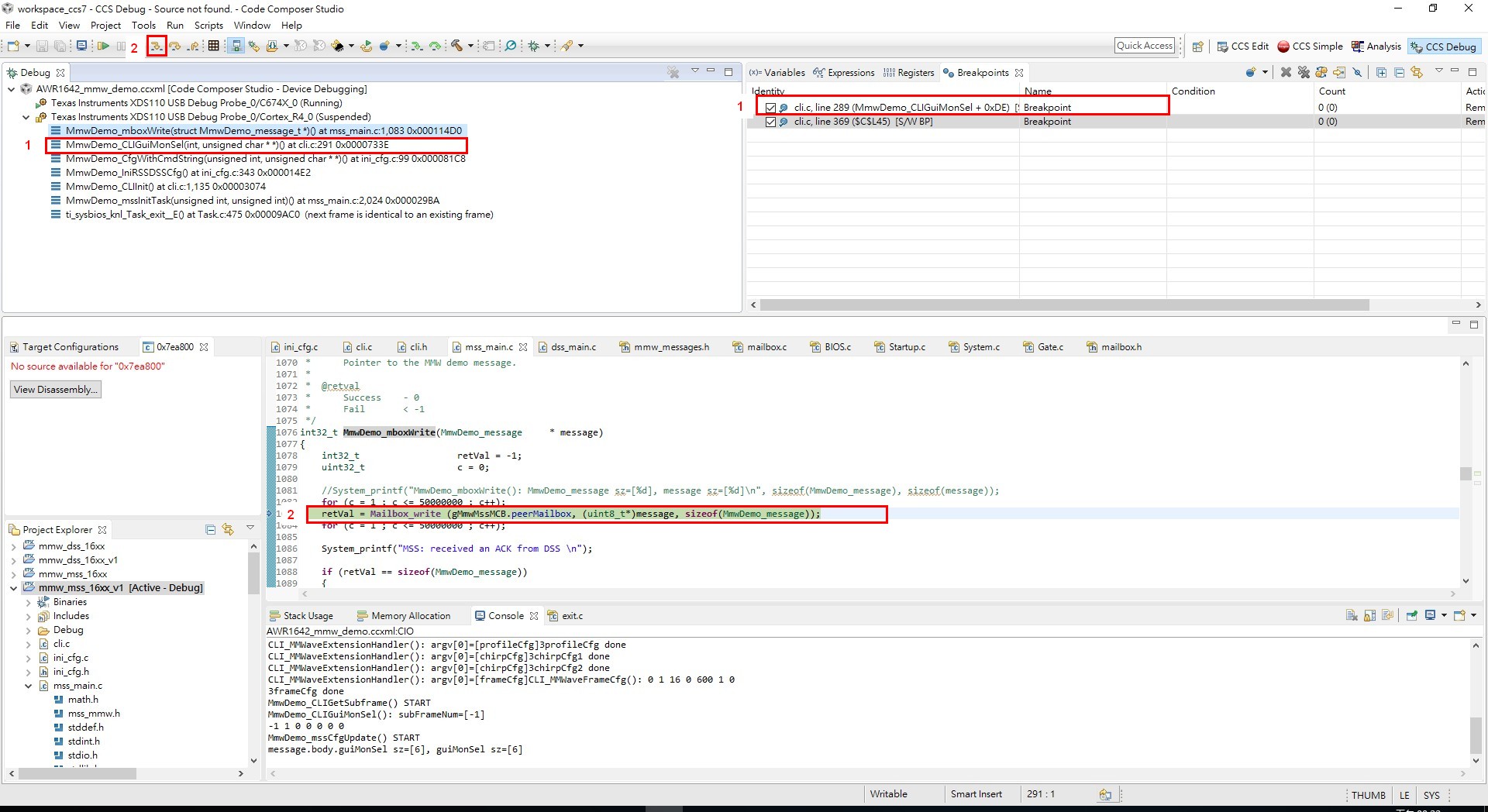
and The AWR1642 crashed on command guiMonitor. the crashed raised by MmwDemo_mboxWrite(). crashed happen as below. Hope you can help me to check this problem. thank you.