


Tool/software: TI-RTOS
I refer the below
e2e.ti.com/.../669254
e2e.ti.com/.../653296

If I send the cmd(StartCommandLine), it will hardcode the configuration(pre-set).
It's success for the first time.
But it will fail for second time.
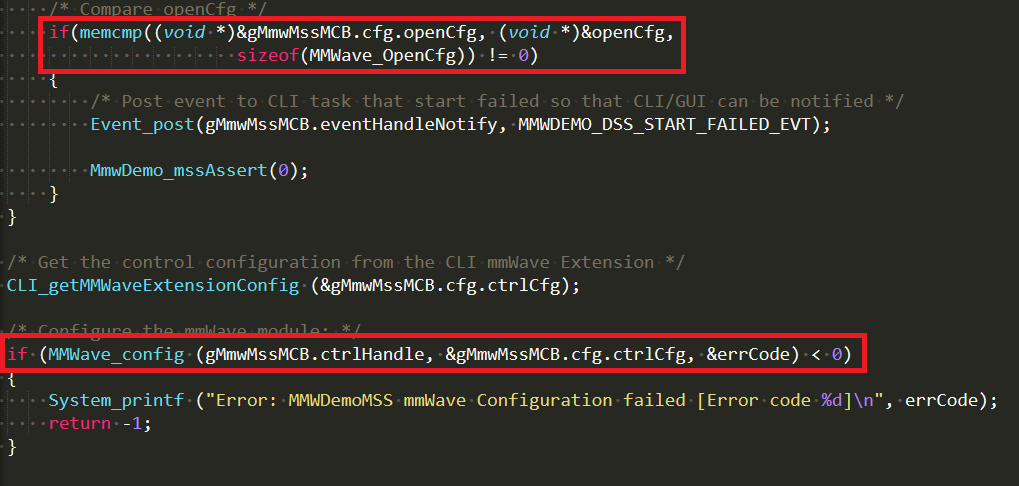
I see the error is from MmwDemo_mssDataPathConfig.
--CLI_getMMWaveExtensionOpenConfig (&gMmwMssMCB.cfg.openCfg);
--CLI_getMMWaveExtensionOpenConfig (&openCfg);
When they'are different, it will be error.
If I want to use my CLI.
How can I to avoid the error?
Regards,
Jui Yang

