Hello,
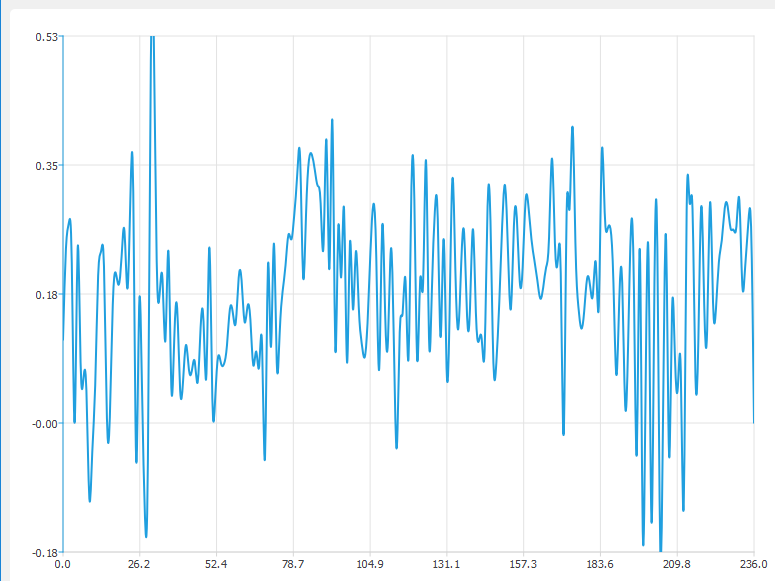
I have been trying to get a program running that follows my hand up and down using the sensor. The following works fine but the data from the sensor is inaccurate it jumps a bit around the position that your hand is in. It is ok to have it jump a bit but I included a picture from data samples I took when testing. As you can see in the picture the data is all over the place, on the left axis it shows the position of the Z axis in meters and on the bottom axis it has the frames. This is all done by the configuration that I included with the title "15fps-clutteroff". I also tried to do it with the static clutter on, but that takes a lot of processing power but is way better than when the clutter removal is off. There is still some inacurate data but less than with the clutter off.
I saw in the document of the fundamental of millimeter wave that it said that the bigger the angle was that it was more inacurate, but how inacurate? It this something that is a known issue with the device or is there a way to get it more stable? Do I need to provide more info?
Thanks,
Vera