Other Parts Discussed in Thread: LDC1614,
Hi,
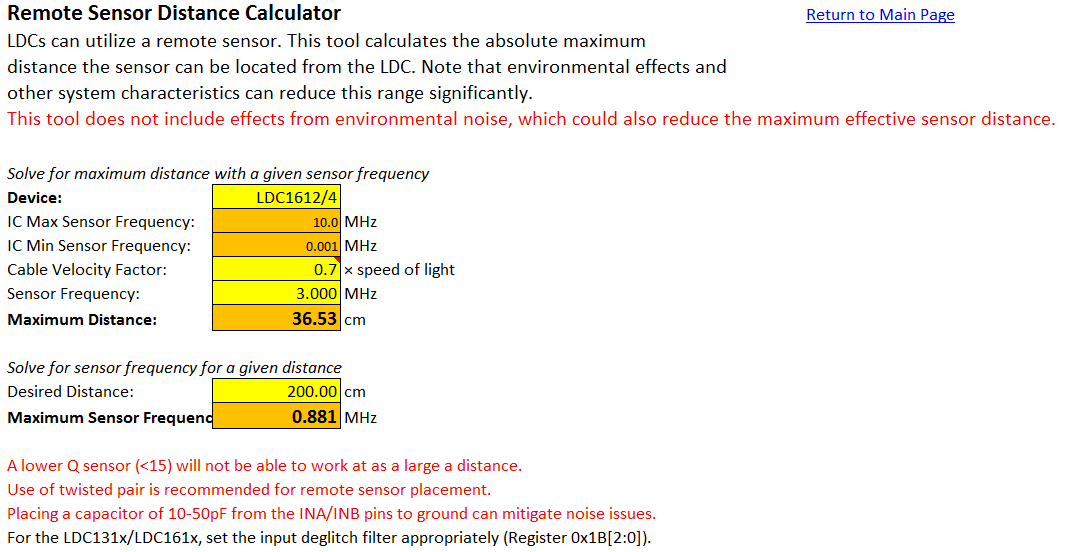
I have an application that requires sensors to be as far as 2m. I’m experiencing sensor drop out and saturation issues, but not sure if this may be the cause.
Note I'm not talking about the distance of the Target to the sensor.
Does anyone have any recommendation for this situation?
LDC to Sensor distance: 1.6m away, (Cp is next to LDC to account for the additional L added by connecting wire)
Sensor:
Diameter: 13.9mm
Turns/Layer: 19
Layers: 2
Trace/Spacing: 0.15mm/0.15mm
Target Square: 4xSensor Diameter, Stainless Steel, Axial Motion, Max/Min Distance 5mm/0.25mm
The connecting cable is 2 wire, (AWG32), twisted pair with shield and drain. (drain grounded)
When sensors are next to LDC, Inductance measures 8.3uH @ 3.03MHz, @ 1.6m - 14.2uH @ 2.9MHz