Hi,
I'm using the AWR1642BOOST and Radar Studio.
According to the default configuration of RadarStudio, the radar measurement range is 25m.
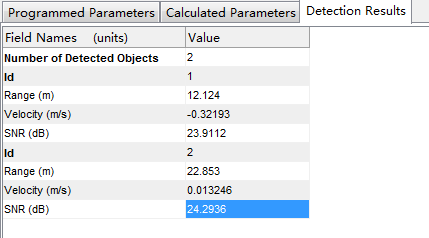
and I've tested a target that can measure at least 24m.
The default configuration:
ADC config Format: Complex2x;
Sample Rate(ksps): 10000;
Slop : 30MHz/us.
According to the formula in document SWRA553->www.ti.com/.../swra553.pdf
In case of complex2x mode, the IF bandwidth is limited to 0.9*(Sample Rate)/2. The maximum of IF bandwidth is 4.5MHz.
Range max = (IFmax * C)/(2*S)
IFmax -> maximum IF bandwidth supported;
C -> Speed of light;
S -> Solp of the transmitted chirp.
So get the maximum range is 22.5m.
This result contradicts the previous one.
Thank you in advance for your response.
Xian