


Hello,
I am trying to compute the RCS(Radar cross section). I am using the formula given below from module 4 of training session.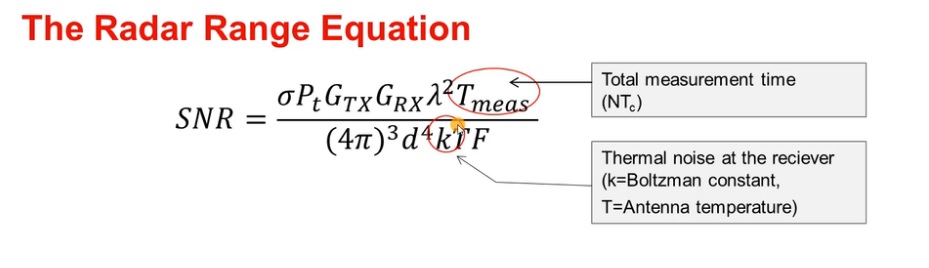
I have certain questions regarding RCS computation.
Doppler SNR values and range values we get from the dss_data_path.c, but the values are around 1000 and 2000. I think I need to do some calculations to get it in dB and in meters. But I dont know the formula for conversion.
1. The formula for values conversion in dB amd in meters
2. Also some values for computing RCS are constant, like Pt = 12.5 dBm, Gtx=9dBi, Grx=9dBi, lamda=4mm(approx.), noise figure= 15 dBm, are those values correct for RCS ?
3. what would be the antenna temperature ?
Regards,
Neil


