


-
mmWave SDK 01.02.00.05
-
Silicon revision ES1.0
-
Code Composer Studio Version: 8.1.0.00011
Hello,
I am working on system where I am interested in the distance to the closest obstacle at each azimuth. I have built this by making modifications to the people counting demo and taking data from the heatmap produced by that demo. However, I am having some issues with this data and some spurious readings. There are two main issues:
Firstly, there are consistently high readings in the first 5 or so range bins across all azimuth, which is corresponding to a distance of about 20cm, even when there is no objects near the sensor. My current workaround for this problem is to just discount these bins when looking for the closest point above a certain threshold. I am thinking that this is likely to do with the Antenna coupling signature described in the mmw Demo documentation, Is this the case? If so there is a CLI command for the mmw demo program to remove the antenna coupling signature but this command and the associated functionality is not in the people counting demo. Looking at the relevant sections of code I am thinking that it should be relatively straightforward for me to to transfer into the people counting demo, is there any reason this is not the case?
Secondly, there is a problem where, when the is an object in the FoV of the sensor it will give the strongest reading at the range and azimuth bins it occupies but with also cast ghost readings into the other azimuths at that range. This problem also can be seen in the heatmap in the mm wave demo visualiser when running the mmw demo. 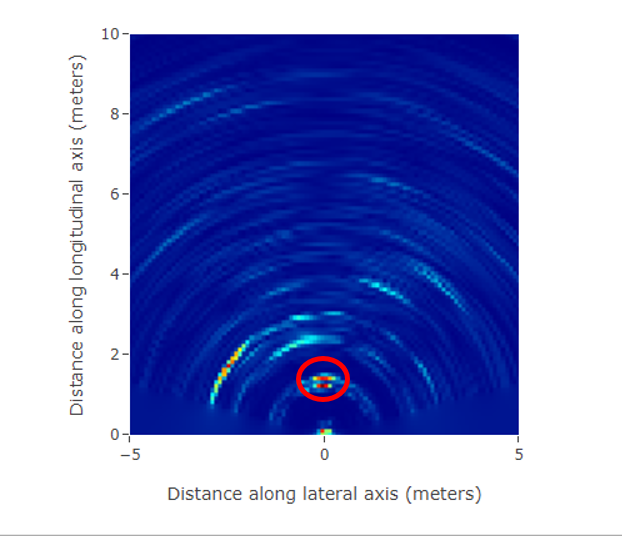
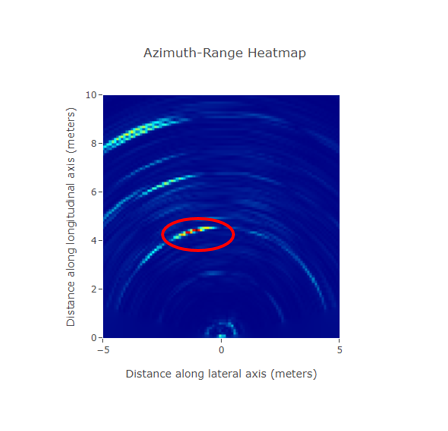
The actual object is highlighted in red and the additional readings can be seen at other azimuths at that range even though there are no objects there. The effect this has on my readings is shown in the bellow image where x is azimuth and y is the distance to the nearest bin above a given threshold. The dip in the line shows the actual object and the flat line is the ghost readings cast across that range.
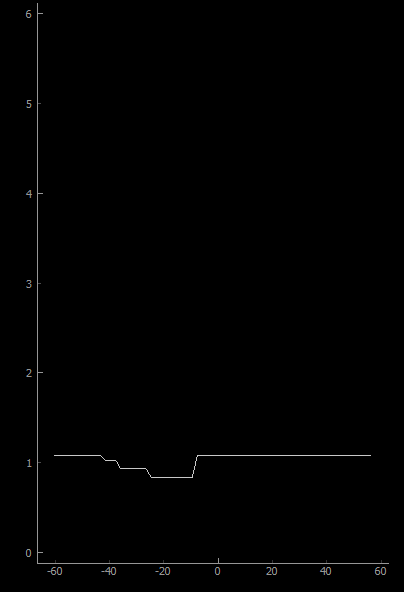
Increasing the threshold for detection can help with this problem, especially for the further ranges, but can not remove it for ranges bellow 1m without becoming unable to detect many true objects.
I am wondering if this problem at near ranges may be related to the phase error at near field described in the near field correction section in the mmw demo documentation, could this be the case? If it is then there is again the problem that the functionality that exists in the mmw demo to solve this is not in people counting demo. However in this case it does not look straightforward to lift it from the mmw demo as the relevant part of the data path is substantially different. I am thinking that in the people counting demo the near field correction would need to be applied in RADARDEMO_aoaEstCaponBF_heatmap as this is where the azimuth data is calculated for the heatmap, would this be the case?
If this problem is not to do with the near field correction do you have any suggestions as to what might be causing it?
Many thanks,
Tim
