


Part Number: AWR1642BOOST
Other Parts Discussed in Thread: AWR1642
Hi,
A. I have read document "Short Range Radar Reference Design Using AWR1642". And I'm curious about USRR Maximum velocity which is only 36 kph (at document page 2).
A1. if under the condition of USRR Maximum velocity 36 kph, what scenario is suitable for USRR application? (In my point of view, USRR would not be good at Highway, Freeway, Urban scenario or any kind of high speed scenario.)
A2. Do you have any suggestion for improving USRR Maximum velocity and this improvement could keep performance?
B. In video (2:39) : Short range radar demonstration using TI’s mmWave sensors (https://www.youtube.com/watch?v=ziQjbVXcSts),
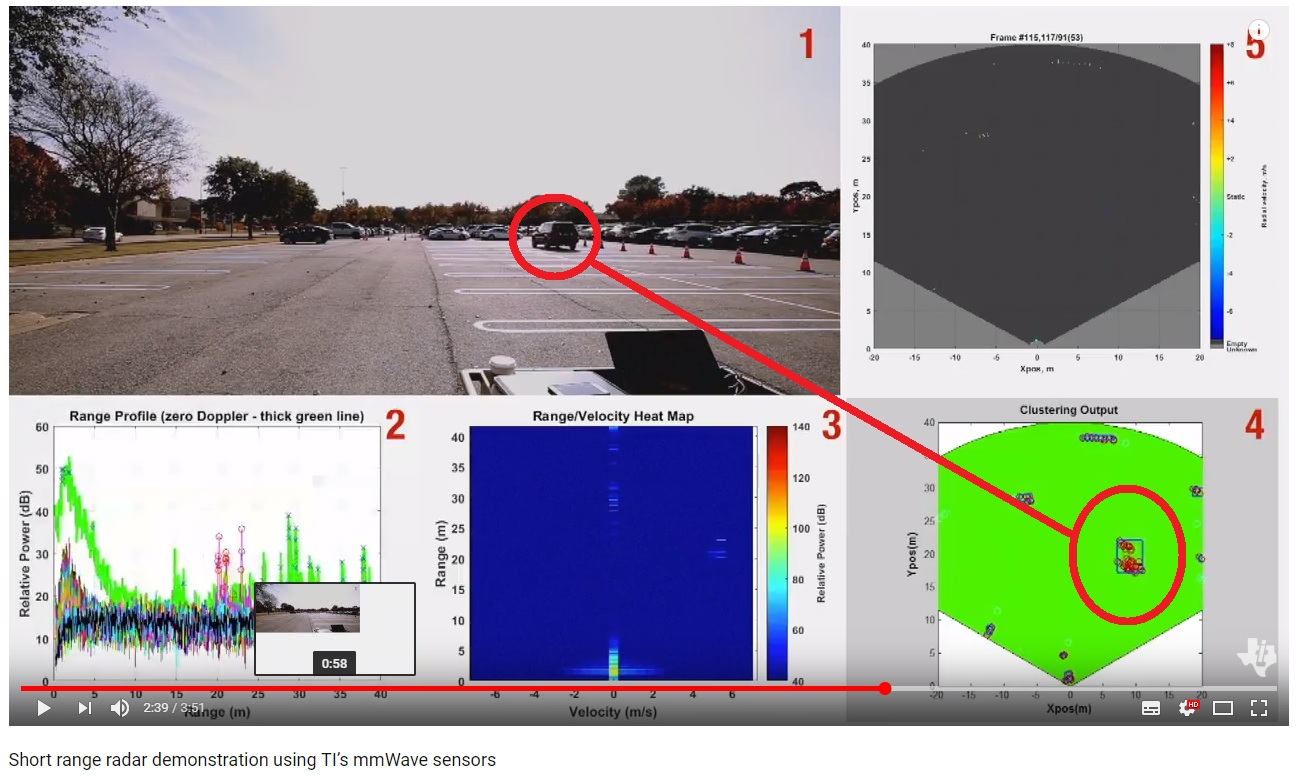
B.1 Why do those points distribute like this? And is it reasonable?
B.2 There is a rectangle used for describing this cluster. Is it suitable for describing target physical size(car)?
Thank you in advance.
Best Regards,
Kevin Chan
