Hi Michelle,
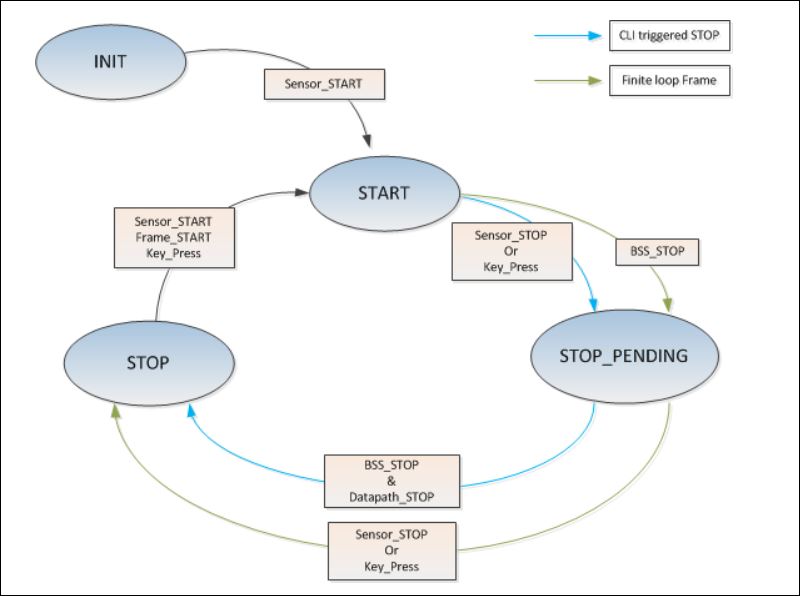
You have partially addressed my question. Yes, trying to put in a delay while the part is chirping but I tried to issue a sensor stop command to stop the part from chirping before I attempt a delay. Please correct me if I am wrong but through the command line, if I issue a sensorStop command, the part stops chirping. This command calls the function MmwDemo_CLISensorStop. This function calls to other functions, i.e., MmwDemo_notifySensorStop and MmwDemo_waitSensorStopComplete. When I step through these commands with a debugger, I can step through the MmwDemo_notifySensorStop function but not the MmwDemo_waitSensorStopComplete function since it is waiting for an event to finish. My question is how can I push the event to happen so I can stop the part from chirping?
Thanks.
Al