



Hi,
I want know,where exctly the range value is calculated prior to display on visualizer?
What is the resoluton of range, like( it measure only 100cm, 90cm in steps of 10 cm or in steps of cm is it possible after reaching near the object by 10 cm, 9cm,8cm?
I have already checked with High accuracy lab but since FOV is coming very less. I want to try this with mmwave demo, If I could get range value found by the radar and I can compare that, so that the FOV is around 60 degree.
Kindly ans these
1. Where exactly the range value is calculated(like we have tempRange in high accuracy lab)?( it would be good if you show in code)
2. Till what point It can give range accurately?(for me it should be below 10cm ..and in steps of atlest 9cm,8cm,7cm etc...
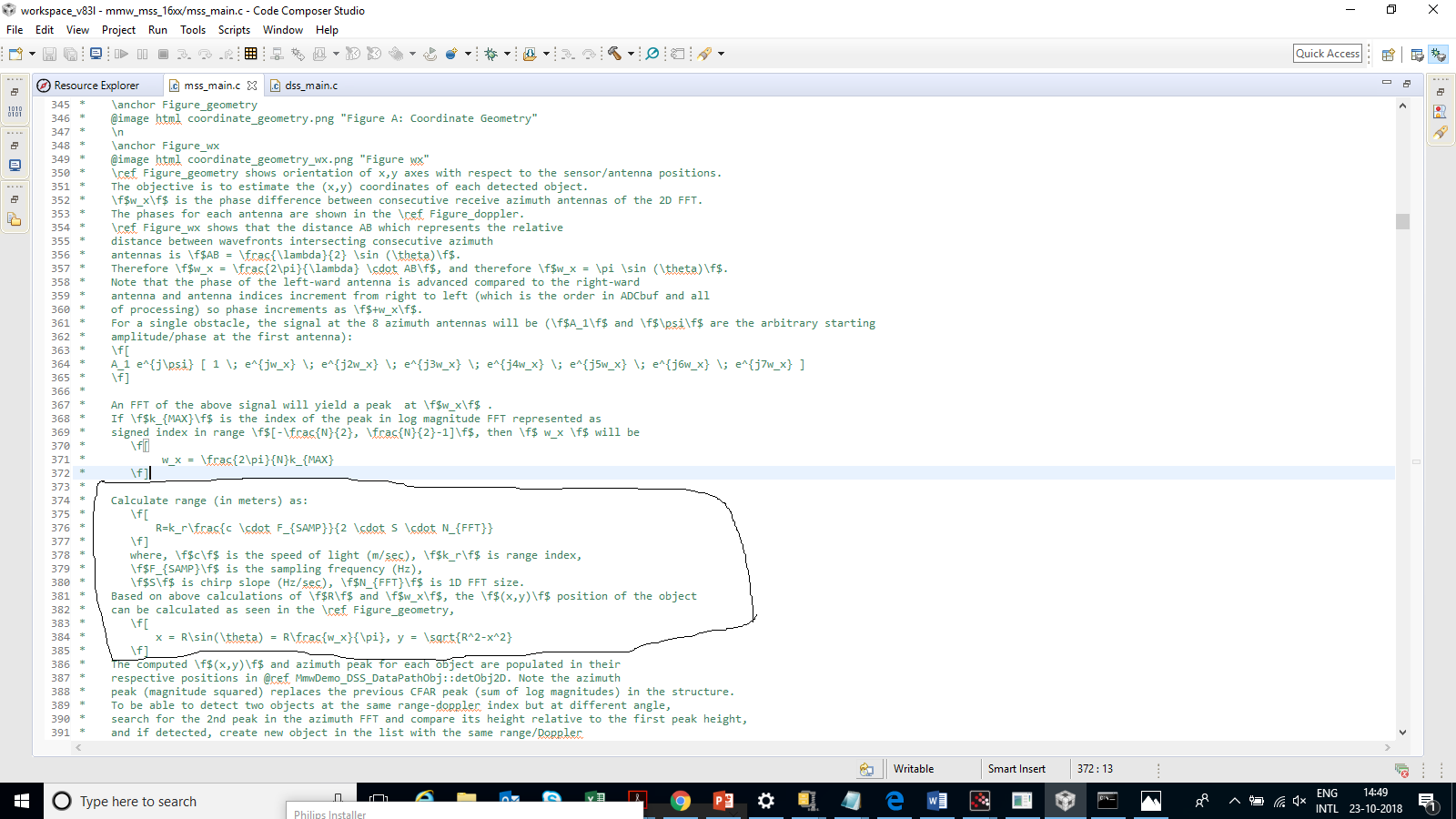
3. As shown in above image it is said that we can calculate the range in meteers using the formula, is it there already in code?if not how do we write it and where?
regards
Karthik

{kind=link}