


Hi
i configured the application for long range,
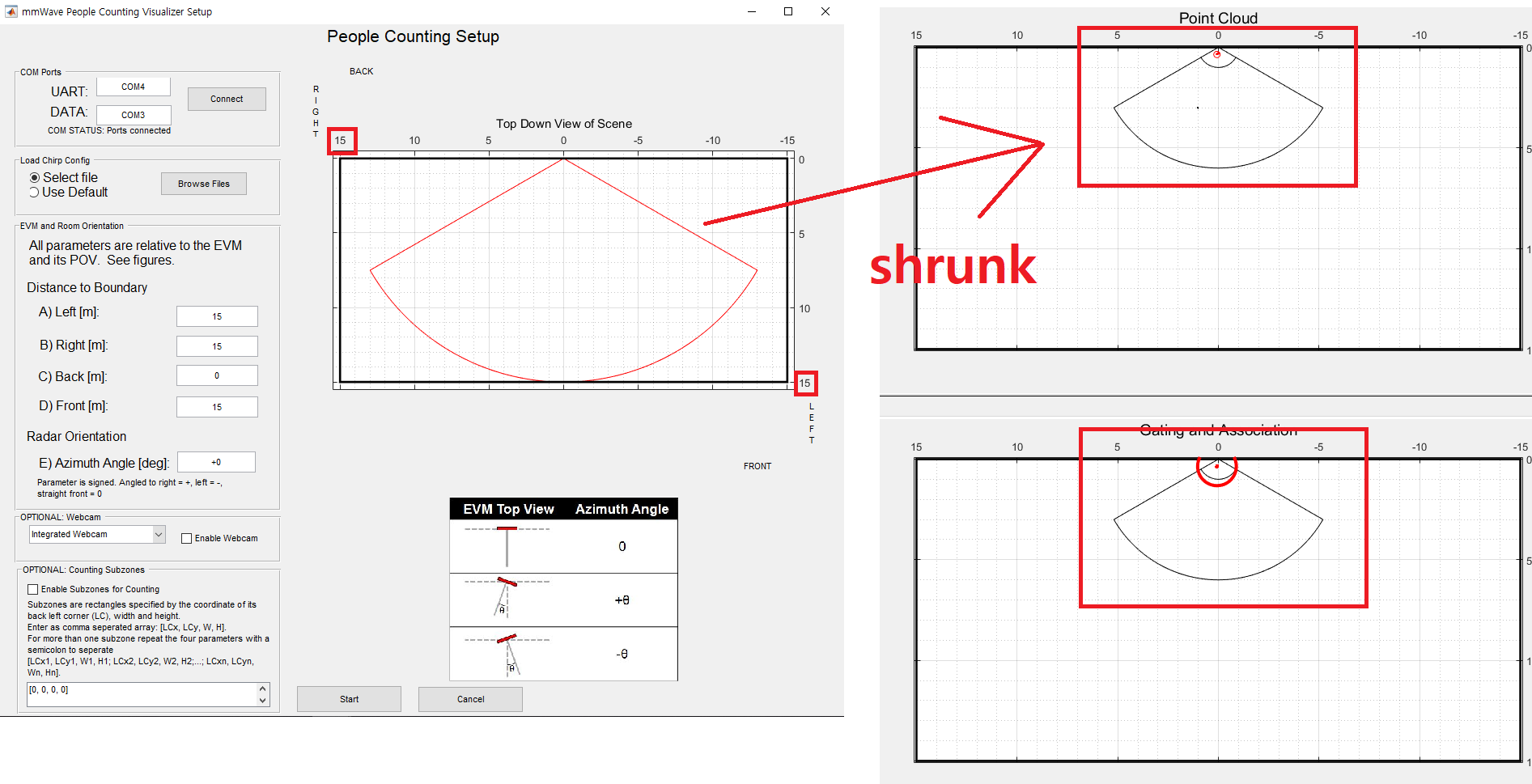
it seemed good before pressing Start button,
however after that, as you see the picture below, the range it can detect is shrunk.
would you tell me what i missed out and tell me how to fix it ?
thanks
Hi
i configured the application for long range,
it seemed good before pressing Start button,
however after that, as you see the picture below, the range it can detect is shrunk.
would you tell me what i missed out and tell me how to fix it ?
thanks

