Other Parts Discussed in Thread: UNIFLASH, IWR1642, AWR1642
Tool/software: Linux
Hi Guys,
I am having trouble getting points to be displayed in Rviz.
AWR1642BOOST ES2.0 (502AC)
SDK 2.0
I have reflashed the device using UniFlash to get the SDK OOB Demo working in the Google Chrome browser. The OOB demo works for both SDK 2.0 and SDK 2.1.
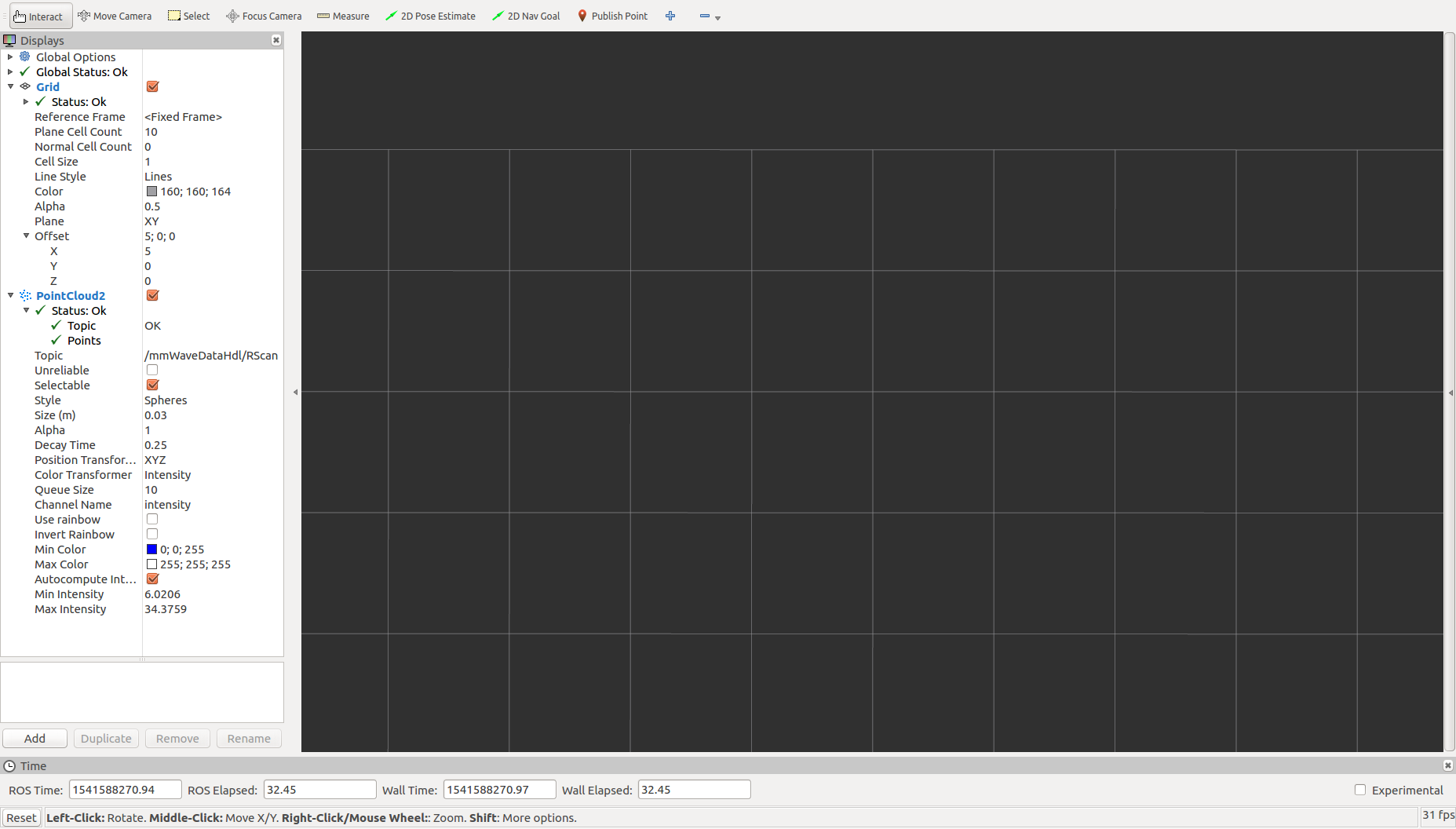
I can run the roslaunch command without getting any errors. All of my commands register as successful. My D3 light is on. I have tried power cycling of the device and power cycling of the system. I have also added the "lowPower 0 1' command to the .cfg file. I will include the CLI log of running the roslaunch command, a picture of the Rviz window, and the text of the .cfg file.
Thank you for your patience in working with me as I learn more about this device.
Respectfully,
Garrett
************************************************************************************************************************************************************************************
garrett@_:~/catkin_ws/src/ti_mmwave_rospkg$ roslaunch ti_mmwave_rospkg rviz_1642_2d.launch
... logging to /home/garrett/.ros/log/3e7181ec-e279-11e8-9ccc-d89ef3776fdc/roslaunch-oci-30421.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://:39737/
SUMMARY
========
PARAMETERS
* /mmWave_Manager/command_port: /dev/ttyACM0
* /mmWave_Manager/command_rate: 115200
* /mmWave_Manager/data_port: /dev/ttyACM1
* /mmWave_Manager/data_rate: 921600
* /mmWave_Manager/max_allowed_azimuth_angle_deg: 90
* /mmWave_Manager/max_allowed_elevation_angle_deg: 90
* /rosdistro: kinetic
* /rosversion: 1.12.14
NODES
/
mmWaveQuickConfig (ti_mmwave_rospkg/mmWaveQuickConfig)
mmWave_Manager (ti_mmwave_rospkg/ti_mmwave_rospkg)
rviz (rviz/rviz)
static_tf_map_to_base_radar_link (tf/static_transform_publisher)
auto-starting new master
process[master]: started with pid [30431]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to 3e7181ec-e279-11e8-9ccc-d89ef3776fdc
process[rosout-1]: started with pid [30444]
started core service [/rosout]
process[mmWave_Manager-2]: started with pid [30452]
process[mmWaveQuickConfig-3]: started with pid [30462]
[ INFO] [1541587102.572424664]: mmWaveQuickConfig: Configuring mmWave device using config file: /home/garrett/catkin_ws/src/ti_mmwave_rospkg/cfg/1642_2d.cfg
process[static_tf_map_to_base_radar_link-4]: started with pid [30463]
[ INFO] [1541587102.575848627]: waitForService: Service [/mmWaveCommSrv/mmWaveCLI] has not been advertised, waiting...
process[rviz-5]: started with pid [30474]
[ INFO] [1541587102.593251092]: Initializing nodelet with 12 worker threads.
[ INFO] [1541587102.595971154]: mmWaveCommSrv: command_port = /dev/ttyACM0
[ INFO] [1541587102.595994357]: mmWaveCommSrv: command_rate = 115200
[ INFO] [1541587102.598098709]: mmWaveDataHdl: data_port = /dev/ttyACM1
[ INFO] [1541587102.598112932]: mmWaveDataHdl: data_rate = 921600
[ INFO] [1541587102.598119482]: mmWaveDataHdl: max_allowed_elevation_angle_deg = 90
[ INFO] [1541587102.598125025]: mmWaveDataHdl: max_allowed_azimuth_angle_deg = 90
[ INFO] [1541587102.617266218]: waitForService: Service [/mmWaveCommSrv/mmWaveCLI] is now available.
[ INFO] [1541587102.617487042]: mmWaveQuickConfig: Ignored blank or comment line: '% ***************************************************************'
[ INFO] [1541587102.617631822]: mmWaveQuickConfig: Ignored blank or comment line: '% Created for SDK ver:01.01'
[ INFO] [1541587102.617774433]: mmWaveQuickConfig: Ignored blank or comment line: '% Created using Visualizer ver:1.1.0.1'
[ INFO] [1541587102.617914143]: mmWaveQuickConfig: Ignored blank or comment line: '% Frequency:77'
[ INFO] [1541587102.618053113]: mmWaveQuickConfig: Ignored blank or comment line: '% Platform:xWR16xx'
[ INFO] [1541587102.618193177]: mmWaveQuickConfig: Ignored blank or comment line: '% Scene Classifier:best_range_res'
[ INFO] [1541587102.618332709]: mmWaveQuickConfig: Ignored blank or comment line: '% Azimuth Resolution(deg):15'
[ INFO] [1541587102.618472360]: mmWaveQuickConfig: Ignored blank or comment line: '% Range Resolution(m):0.044'
[ INFO] [1541587102.618611948]: mmWaveQuickConfig: Ignored blank or comment line: '% Maximum unambiguous Range(m):9.08'
[ INFO] [1541587102.618755251]: mmWaveQuickConfig: Ignored blank or comment line: '% Maximum Radial Velocity(m/s):5.06'
[ INFO] [1541587102.618908887]: mmWaveQuickConfig: Ignored blank or comment line: '% Radial velocity resolution(m/s):0.64'
[ INFO] [1541587102.619062521]: mmWaveQuickConfig: Ignored blank or comment line: '% Frame Duration(msec):33.333'
[ INFO] [1541587102.619199660]: mmWaveQuickConfig: Ignored blank or comment line: '% Range Detection Threshold (dB):9'
[ INFO] [1541587102.619336604]: mmWaveQuickConfig: Ignored blank or comment line: '% Doppler Detection Threshold (dB):9'
[ INFO] [1541587102.619471823]: mmWaveQuickConfig: Ignored blank or comment line: '% Range Peak Grouping:disabled'
[ INFO] [1541587102.619607072]: mmWaveQuickConfig: Ignored blank or comment line: '% Doppler Peak Grouping:disabled'
[ INFO] [1541587102.619743222]: mmWaveQuickConfig: Ignored blank or comment line: '% Static clutter removal:disabled'
[ INFO] [1541587102.619881911]: mmWaveQuickConfig: Ignored blank or comment line: '% ***************************************************************'
[ INFO] [1541587102.620129415]: mmWaveQuickConfig: Sending command: 'sensorStop'
[ INFO] [1541587102.621864874]: mmWaveCommSrv: Sending command to sensor: 'sensorStop'
[ INFO] [1541587102.624749440]: mmWaveCommSrv: Received response from sensor: 'sensorStop
Done
mmwDemo:/>'
[ INFO] [1541587102.625663501]: mmWaveQuickConfig: Command successful (mmWave sensor responded with 'Done')
[ INFO] [1541587102.625952118]: mmWaveQuickConfig: Sending command: 'flushCfg'
[ INFO] [1541587102.626951683]: mmWaveCommSrv: Sending command to sensor: 'flushCfg'
[ INFO] [1541587102.629624511]: mmWaveCommSrv: Received response from sensor: 'flushCfg
Done
mmwDemo:/>'
[ INFO] [1541587102.630561351]: mmWaveQuickConfig: Command successful (mmWave sensor responded with 'Done')
[ INFO] [1541587102.630930953]: mmWaveQuickConfig: Sending command: 'lowPower 0 1'
[ INFO] [1541587102.631847795]: mmWaveCommSrv: Sending command to sensor: 'lowPower 0 1'
[ INFO] [1541587102.634861594]: mmWaveCommSrv: Received response from sensor: 'lowPower 0 1
Done
mmwDemo:/>'
[ INFO] [1541587102.635670496]: mmWaveQuickConfig: Command successful (mmWave sensor responded with 'Done')
[ INFO] [1541587102.636054734]: mmWaveQuickConfig: Sending command: 'dfeDataOutputMode 1'
[ INFO] [1541587102.637266197]: mmWaveCommSrv: Sending command to sensor: 'dfeDataOutputMode 1'
[ INFO] [1541587102.640908470]: mmWaveCommSrv: Received response from sensor: 'dfeDataOutputMode 1
Done
mmwDemo:/>'
[ INFO] [1541587102.641736985]: mmWaveQuickConfig: Command successful (mmWave sensor responded with 'Done')
[ INFO] [1541587102.641995671]: mmWaveQuickConfig: Sending command: 'channelCfg 15 3 0'
[ INFO] [1541587102.643317144]: mmWaveCommSrv: Sending command to sensor: 'channelCfg 15 3 0'
[ INFO] [1541587102.646777565]: mmWaveCommSrv: Received response from sensor: 'channelCfg 15 3 0
Done
mmwDemo:/>'
[ INFO] [1541587102.647670709]: mmWaveQuickConfig: Command successful (mmWave sensor responded with 'Done')
[ INFO] [1541587102.647926403]: mmWaveQuickConfig: Sending command: 'adcCfg 2 1'
[ INFO] [1541587102.649349184]: mmWaveCommSrv: Sending command to sensor: 'adcCfg 2 1'
[ INFO] [1541587102.652204092]: mmWaveCommSrv: Received response from sensor: 'adcCfg 2 1
Done
mmwDemo:/>'
[ INFO] [1541587102.653029489]: mmWaveQuickConfig: Command successful (mmWave sensor responded with 'Done')
[ INFO] [1541587102.653327578]: mmWaveQuickConfig: Sending command: 'adcbufCfg -1 0 0 1 0'
[ INFO] [1541587102.654541829]: mmWaveCommSrv: Sending command to sensor: 'adcbufCfg -1 0 0 1 0'
[ INFO] [1541587102.658320729]: mmWaveCommSrv: Received response from sensor: 'adcbufCfg -1 0 0 1 0
Done
mmwDemo:/>'
[ INFO] [1541587102.659226324]: mmWaveQuickConfig: Command successful (mmWave sensor responded with 'Done')
[ INFO] [1541587102.659488307]: mmWaveQuickConfig: Sending command: 'profileCfg 0 77 39 7 57.14 0 0 70 1 256 5209 0 0 30'
[ INFO] [1541587102.660597292]: mmWaveCommSrv: Sending command to sensor: 'profileCfg 0 77 39 7 57.14 0 0 70 1 256 5209 0 0 30'
[ INFO] [1541587102.667041222]: mmWaveCommSrv: Received response from sensor: 'profileCfg 0 77 39 7 57.14 0 0 70 1 256 5209 0 0 30
Done
mmwDemo:/>'
[ INFO] [1541587102.667923065]: mmWaveQuickConfig: Command successful (mmWave sensor responded with 'Done')
[ INFO] [1541587102.672650183]: mmWaveQuickConfig: Sending command: 'chirpCfg 0 0 0 0 0 0 0 1'
[ INFO] [1541587102.673693278]: mmWaveCommSrv: Sending command to sensor: 'chirpCfg 0 0 0 0 0 0 0 1'
[ INFO] [1541587102.677781038]: mmWaveCommSrv: Received response from sensor: 'chirpCfg 0 0 0 0 0 0 0 1
Done
mmwDemo:/>'
[ INFO] [1541587102.678704950]: mmWaveQuickConfig: Command successful (mmWave sensor responded with 'Done')
[ INFO] [1541587102.678978680]: mmWaveQuickConfig: Sending command: 'chirpCfg 1 1 0 0 0 0 0 2'
[ INFO] [1541587102.680234711]: mmWaveCommSrv: Sending command to sensor: 'chirpCfg 1 1 0 0 0 0 0 2'
[ INFO] [1541587102.684301873]: mmWaveCommSrv: Received response from sensor: 'chirpCfg 1 1 0 0 0 0 0 2
Done
mmwDemo:/>'
[ INFO] [1541587102.685183575]: mmWaveQuickConfig: Command successful (mmWave sensor responded with 'Done')
[ INFO] [1541587102.685519534]: mmWaveQuickConfig: Sending command: 'frameCfg 0 1 16 0 33.333 1 0'
[ INFO] [1541587102.687007720]: mmWaveCommSrv: Sending command to sensor: 'frameCfg 0 1 16 0 33.333 1 0'
[ INFO] [1541587102.691454911]: mmWaveCommSrv: Received response from sensor: 'frameCfg 0 1 16 0 33.333 1 0
Done
mmwDemo:/>'
[ INFO] [1541587102.692415455]: mmWaveQuickConfig: Command successful (mmWave sensor responded with 'Done')
[ INFO] [1541587102.697470762]: mmWaveQuickConfig: Sending command: 'guiMonitor -1 1 0 0 0 0 0'
[ INFO] [1541587102.698745699]: mmWaveCommSrv: Sending command to sensor: 'guiMonitor -1 1 0 0 0 0 0'
[ INFO] [1541587102.702906998]: mmWaveCommSrv: Received response from sensor: 'guiMonitor -1 1 0 0 0 0 0
Done
mmwDemo:/>'
[ INFO] [1541587102.703711128]: mmWaveQuickConfig: Command successful (mmWave sensor responded with 'Done')
[ INFO] [1541587102.704023979]: mmWaveQuickConfig: Sending command: 'cfarCfg -1 0 0 8 4 4 0 3072'
[ INFO] [1541587102.705517963]: mmWaveCommSrv: Sending command to sensor: 'cfarCfg -1 0 0 8 4 4 0 3072'
[ INFO] [1541587102.709867579]: mmWaveCommSrv: Received response from sensor: 'cfarCfg -1 0 0 8 4 4 0 3072
Done
mmwDemo:/>'
[ INFO] [1541587102.710754783]: mmWaveQuickConfig: Command successful (mmWave sensor responded with 'Done')
[ INFO] [1541587102.711081848]: mmWaveQuickConfig: Sending command: 'cfarCfg -1 1 0 4 2 3 0 3072'
[ INFO] [1541587102.712345887]: mmWaveCommSrv: Sending command to sensor: 'cfarCfg -1 1 0 4 2 3 0 3072'
[ INFO] [1541587102.716747158]: mmWaveCommSrv: Received response from sensor: 'cfarCfg -1 1 0 4 2 3 0 3072
Done
mmwDemo:/>'
[ INFO] [1541587102.717605316]: mmWaveQuickConfig: Command successful (mmWave sensor responded with 'Done')
[ INFO] [1541587102.717914766]: mmWaveQuickConfig: Sending command: 'peakGrouping -1 1 0 0 1 255'
[ INFO] [1541587102.719270675]: mmWaveCommSrv: Sending command to sensor: 'peakGrouping -1 1 0 0 1 255'
[ INFO] [1541587102.723652223]: mmWaveCommSrv: Received response from sensor: 'peakGrouping -1 1 0 0 1 255
Done
mmwDemo:/>'
[ INFO] [1541587102.724748786]: mmWaveQuickConfig: Command successful (mmWave sensor responded with 'Done')
[ INFO] [1541587102.725075798]: mmWaveQuickConfig: Sending command: 'multiObjBeamForming -1 1 0.5'
[ INFO] [1541587102.726813750]: mmWaveCommSrv: Sending command to sensor: 'multiObjBeamForming -1 1 0.5'
[ INFO] [1541587102.731284165]: mmWaveCommSrv: Received response from sensor: 'multiObjBeamForming -1 1 0.5
Done
mmwDemo:/>'
[ INFO] [1541587102.732270532]: mmWaveQuickConfig: Command successful (mmWave sensor responded with 'Done')
[ INFO] [1541587102.732620561]: mmWaveQuickConfig: Sending command: 'clutterRemoval -1 0'
[ INFO] [1541587102.733952297]: mmWaveCommSrv: Sending command to sensor: 'clutterRemoval -1 0'
[ INFO] [1541587102.737578344]: mmWaveCommSrv: Received response from sensor: 'clutterRemoval -1 0
Done
mmwDemo:/>'
[ INFO] [1541587102.738958427]: mmWaveQuickConfig: Command successful (mmWave sensor responded with 'Done')
[ INFO] [1541587102.739227610]: mmWaveQuickConfig: Sending command: 'calibDcRangeSig -1 0 -5 8 256'
[ INFO] [1541587102.740798168]: mmWaveCommSrv: Sending command to sensor: 'calibDcRangeSig -1 0 -5 8 256'
[ INFO] [1541587102.745320801]: mmWaveCommSrv: Received response from sensor: 'calibDcRangeSig -1 0 -5 8 256
Done
mmwDemo:/>'
[ INFO] [1541587102.746158897]: mmWaveQuickConfig: Command successful (mmWave sensor responded with 'Done')
[ INFO] [1541587102.746454398]: mmWaveQuickConfig: Sending command: 'extendedMaxVelocity -1 0'
[ INFO] [1541587102.747448014]: mmWaveCommSrv: Sending command to sensor: 'extendedMaxVelocity -1 0'
[ INFO] [1541587102.751492306]: mmWaveCommSrv: Received response from sensor: 'extendedMaxVelocity -1 0
Done
mmwDemo:/>'
[ INFO] [1541587102.752370428]: mmWaveQuickConfig: Command successful (mmWave sensor responded with 'Done')
[ INFO] [1541587102.752628507]: mmWaveQuickConfig: Sending command: 'compRangeBiasAndRxChanPhase 0.0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0'
[ INFO] [1541587102.754017601]: mmWaveCommSrv: Sending command to sensor: 'compRangeBiasAndRxChanPhase 0.0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0'
[ INFO] [1541587102.761330277]: mmWaveCommSrv: Received response from sensor: 'compRangeBiasAndRxChanPhase 0.0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0
Done
mmwDemo:/>'
[ INFO] [1541587102.762331777]: mmWaveQuickConfig: Command successful (mmWave sensor responded with 'Done')
[ INFO] [1541587102.762598062]: mmWaveQuickConfig: Sending command: 'measureRangeBiasAndRxChanPhase 0 1.5 0.2'
[ INFO] [1541587102.763727256]: mmWaveCommSrv: Sending command to sensor: 'measureRangeBiasAndRxChanPhase 0 1.5 0.2'
[ INFO] [1541587102.769284406]: mmWaveCommSrv: Received response from sensor: 'measureRangeBiasAndRxChanPhase 0 1.5 0.2
Done
mmwDemo:/>'
[ INFO] [1541587102.770306676]: mmWaveQuickConfig: Command successful (mmWave sensor responded with 'Done')
[ INFO] [1541587102.770565789]: mmWaveQuickConfig: Sending command: 'sensorStart'
[ INFO] [1541587102.771541089]: mmWaveCommSrv: Sending command to sensor: 'sensorStart'
[ INFO] [1541587102.810513689]: mmWaveCommSrv: Received response from sensor: 'sensorStart
Debug: Init Calibration Status = 0x7fe
Done
mmwDemo:/>'
[ INFO] [1541587102.811364596]: mmWaveQuickConfig: Command successful (mmWave sensor responded with 'Done')
[ INFO] [1541587102.812160260]: mmWaveQuickConfig: mmWaveQuickConfig will now terminate. Done configuring mmWave device using config file: /home/garrett/catkin_ws/src/ti_mmwave_rospkg/cfg/1642_2d.cfg
[ INFO] [1541587102.814605832]: Configured DataHandler numRangeBins: 256 numDopplerBins: 16 rangeIdxToM: 0.043602 dopplerResToMps: 0.633208
[ INFO] [1541587102.814901847]: DataUARTHandler Read Thread: Port is open
[mmWaveQuickConfig-3] process has finished cleanly
log file: /home/garrett/.ros/log/3e7181ec-e279-11e8-9ccc-d89ef3776fdc/mmWaveQuickConfig-3*.log
************************************************************************************************************************************************************************************
Here is the .cfg file
% ***************************************************************
% Created for SDK ver:01.01
% Created using Visualizer ver:1.1.0.1
% Frequency:77
% Platform:xWR16xx
% Scene Classifier:best_range_res
% Azimuth Resolution(deg):15
% Range Resolution(m):0.044
% Maximum unambiguous Range(m):9.08
% Maximum Radial Velocity(m/s):5.06
% Radial velocity resolution(m/s):0.64
% Frame Duration(msec):33.333
% Range Detection Threshold (dB):9
% Doppler Detection Threshold (dB):9
% Range Peak Grouping:disabled
% Doppler Peak Grouping:disabled
% Static clutter removal:disabled
% ***************************************************************
sensorStop
flushCfg
lowPower 0 1
dfeDataOutputMode 1
channelCfg 15 3 0
adcCfg 2 1
adcbufCfg -1 0 0 1 0
profileCfg 0 77 39 7 57.14 0 0 70 1 256 5209 0 0 30
chirpCfg 0 0 0 0 0 0 0 1
chirpCfg 1 1 0 0 0 0 0 2
frameCfg 0 1 16 0 33.333 1 0
guiMonitor -1 1 0 0 0 0 0
cfarCfg -1 0 0 8 4 4 0 3072
cfarCfg -1 1 0 4 2 3 0 3072
peakGrouping -1 1 0 0 1 255
multiObjBeamForming -1 1 0.5
clutterRemoval -1 0
calibDcRangeSig -1 0 -5 8 256
extendedMaxVelocity -1 0
compRangeBiasAndRxChanPhase 0.0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0
measureRangeBiasAndRxChanPhase 0 1.5 0.2
sensorStart
************************************************************************************************************************************************************************************
Rviz display. Notice there is no confirmation text next to "Points" check box.