Hi Experts,
I am running the object detection demo from the industrial toolbox with some configurations tweaked.
I am inserting a plain C function with some lines of code.
The configurations are:
-------------------------------------------------------------------------
sensorStop
flushCfg
dfeDataOutputMode 1
channelCfg 15 3 0
adcCfg 2 1
adcbufCfg -1 0 0 1 0
profileCfg 0 77 360 7 57.14 0 0 70 1 256 5209 0 0 30
chirpCfg 0 0 0 0 0 0 0 1
chirpCfg 1 1 0 0 0 0 0 2
bpmCfg -1 0 0 1
frameCfg 0 1 16 0 1000 1 0
lowPower 0 1
guiMonitor -1 1 1 1 0 0 1
cfarCfg -1 0 2 8 4 4 0 5120
cfarCfg -1 1 0 8 4 4 0 5120
peakGrouping -1 1 0 0 1 224
multiObjBeamForming -1 1 0.5
calibDcRangeSig -1 0 -5 8 256
extendedMaxVelocity -1 0
clutterRemoval -1 0
compRangeBiasAndRxChanPhase 0.0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0
measureRangeBiasAndRxChanPhase 0 1.5 0.2
nearFieldCfg -1 0 0 0
CQRxSatMonitor 0 3 4 127 0
CQSigImgMonitor 0 63 8
analogMonitor 1 1
lvdsStreamCfg -1 0 0 0
sensorStart
----------------------------------------------------------------------------
While executing the demo, after processing of some frames, I get the following error:
In My_func: START
In My_func: END
In My_func: START
In My_func: END
In My_func: START
In My_func: END
In My_func: START
In My_func: END
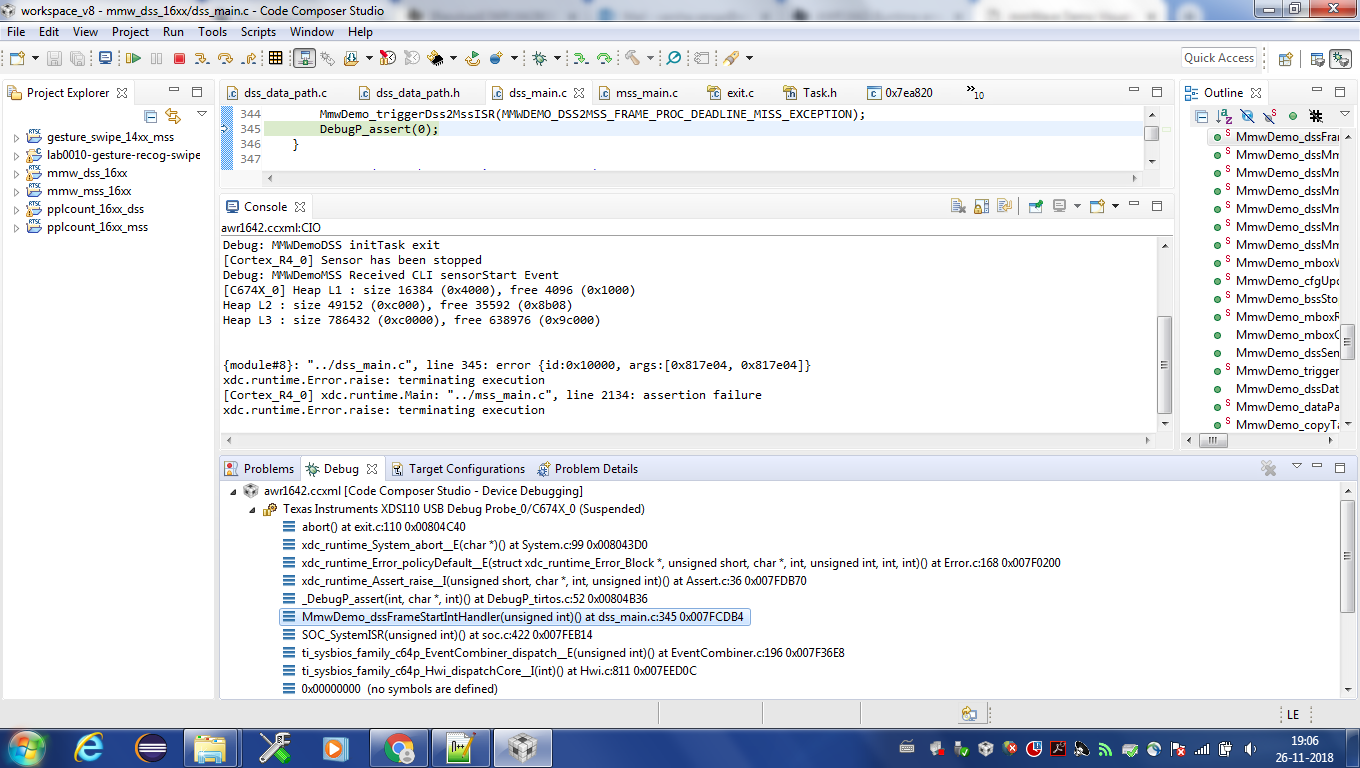
{module#8}: "../dss_main.c", line 345: error {id:0x10000, args:[0x8182a4, 0x8182a4]}
xdc.runtime.Error.raise: terminating execution
[Cortex_R4_0] xdc.runtime.Main: "../mss_main.c", line 2134: assertion failure
xdc.runtime.Error.raise: terminating execution
Can I know what is causing the error? Why is it crashing after some time? Memory related issue?
Regards,
Varsha