


Other Parts Discussed in Thread: PGA460
Hi
We are a company that develops robots,We have designed a PCB board for ultrasonic detection distance, including PGA460 and MA58MF14-7N. Our goal is to detect the distance of 10cm~3m in front of the robot. Now we have encountered some problems, we hope to get your reply.
1.The nearest distance can only be detected at 25cm, and the distance below 25cm is incorrect
2.After a period of use, the maximum detection distance changes from 3m to 60cm (the distance beyond 60cm cannot be detected, it feels like there is something at 60cm) or 30cm or other distances less than 3m. After reconfiguration of PGA460 parameters, it returns to normal
The distance data I get is the data from Preset1 by running burst&listen.
The following are our own design of hardware and configuration parameters of PGA460:
The software parameters:
;GRID_USER_MEMSPACE
(USER_DATA1),00
(USER_DATA2),00
(USER_DATA3),00
(USER_DATA4),00
(USER_DATA5),00
(USER_DATA6),00
(USER_DATA7),00
(USER_DATA8),00
(USER_DATA9),00
(USER_DATA10),00
(USER_DATA11),00
(USER_DATA12),00
(USER_DATA13),00
(USER_DATA14),00
(USER_DATA15),00
(USER_DATA16),00
(USER_DATA17),00
(USER_DATA18),00
(USER_DATA19),00
(USER_DATA20),00
(TVGAIN0),8D
(TVGAIN1),EE
(TVGAIN2),EF
(TVGAIN3),10
(TVGAIN4),A5
(TVGAIN5),20
(TVGAIN6),C0
(INIT_GAIN),40
(FREQUENCY),8F
(DEADTIME),00
(PULSE_P1),10
(PULSE_P2),12
(CURR_LIM_P1),5C
(CURR_LIM_P2),7F
(REC_LENGTH),8C
(FREQ_DIAG),00
(SAT_FDIAG_TH),EE
(FVOLT_DEC),7C
(DECPL_TEMP),0A
(DSP_SCALE),00
(TEMP_TRIM),00
(P1_GAIN_CTRL),08
(P2_GAIN_CTRL),00
(EE_CRC),84
(EE_CNTRL),00
(BPF_A2_MSB),8A
(BPF_A2_LSB),0C
(BPF_A3_MSB),F9
(BPF_A3_LSB),A5
(BPF_B1_MSB),03
(BPF_B1_LSB),2D
(LPF_A2_MSB),7E
(LPF_A2_LSB),67
(LPF_B1_MSB),00
(LPF_B1_LSB),CD
(TEST_MUX),00
(DEV_STAT0),80
(DEV_STAT1),00
(P1_THR_0),88
(P1_THR_1),88
(P1_THR_2),88
(P1_THR_3),88
(P1_THR_4),88
(P1_THR_5),88
(P1_THR_6),84
(P1_THR_7),21
(P1_THR_8),08
(P1_THR_9),42
(P1_THR_10),10
(P1_THR_11),80
(P1_THR_12),80
(P1_THR_13),80
(P1_THR_14),80
(P1_THR_15),00
(P2_THR_0),77
(P2_THR_1),77
(P2_THR_2),77
(P2_THR_3),77
(P2_THR_4),78
(P2_THR_5),88
(P2_THR_6),9C
(P2_THR_7),D0
(P2_THR_8),72
(P2_THR_9),10
(P2_THR_10),63
(P2_THR_11),28
(P2_THR_12),30
(P2_THR_13),34
(P2_THR_14),3C
(P2_THR_15),00
(THR_CRC),AE
EOF
T1&T2: TDK_B78416A2232A003
R9&R18: 2.7k
C5&C18: 1500pF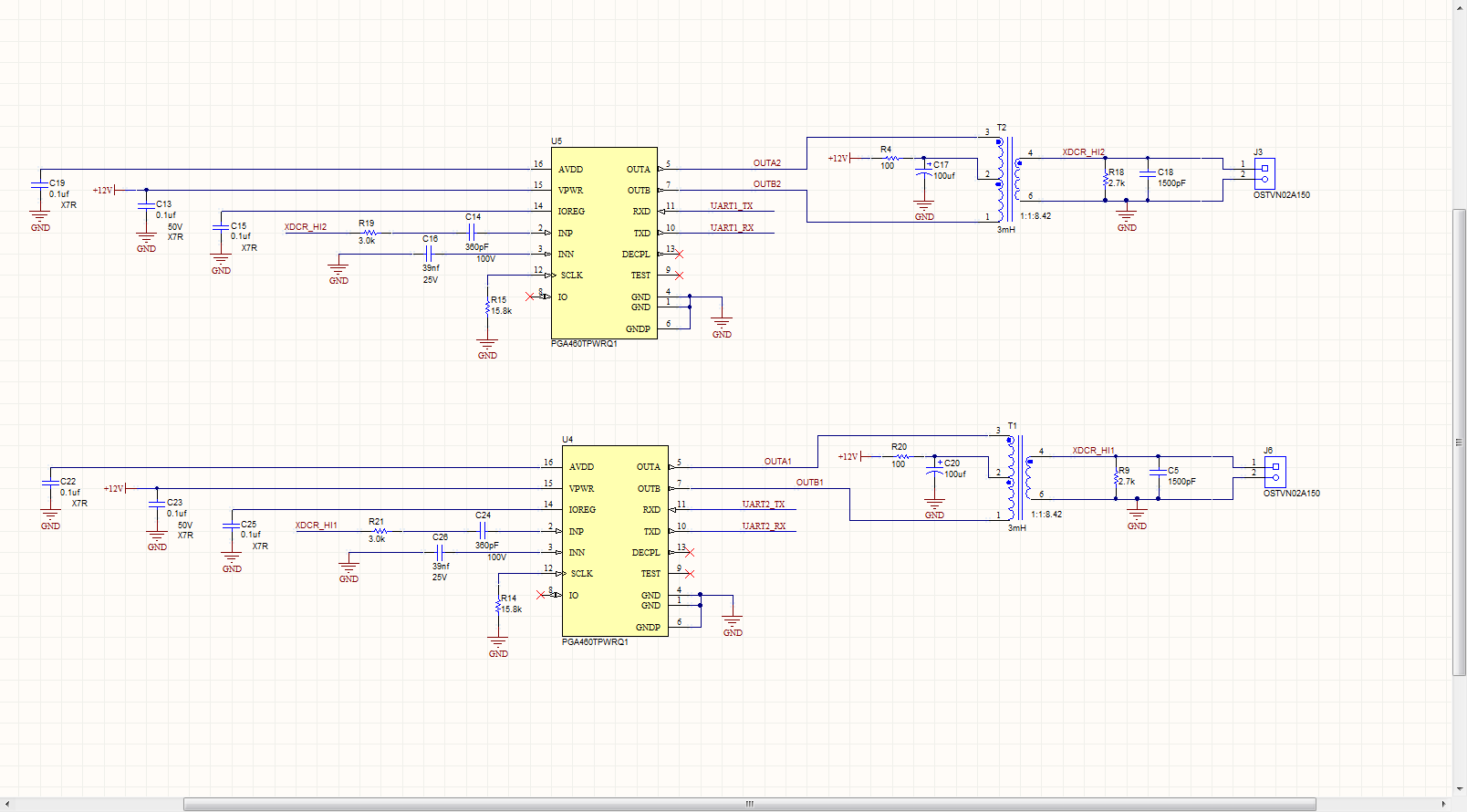
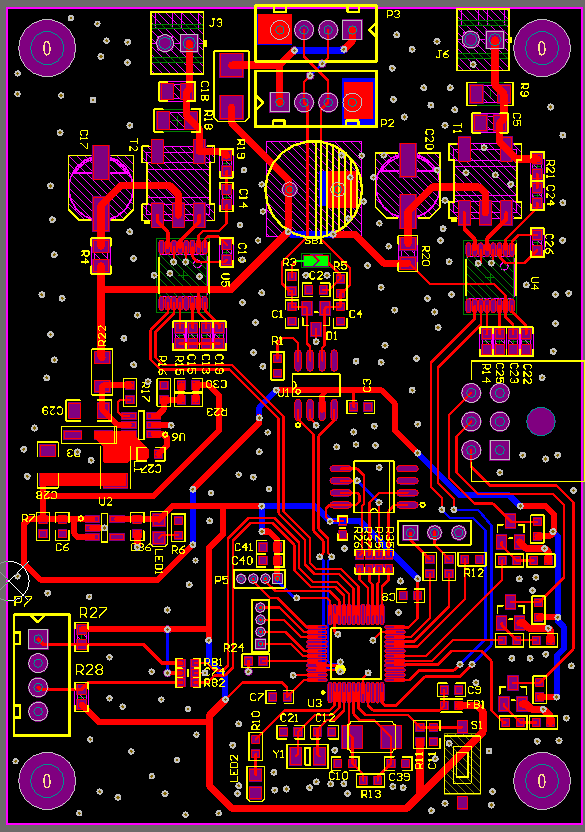
The two transducers on the PCB board correspond to the front and right of the robot respectively
Best Wishes

