Other Parts Discussed in Thread: MMWAVE-STUDIO, MMWAVE-SDK
We are attempting to characterize the IWR6843 for a short range application, maximizing angular velocity resolution, etc.
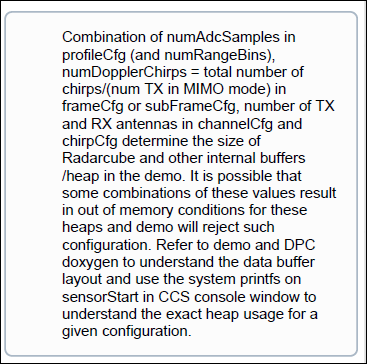
As we change some of the parameters, such as increasing the number of loops in frameCfg, the SDK firmware fails after a certain value. We get some errors on the firmware debugger side that we haven't yet figured out (for example: Error: DPM Report 4 received with error:-40112 arg0:0x64 arg1:0x8004cd8). Tracing the code, we find it is originating in the mmWaveLink level in rl_driver.c and rl_sensor.c. We assume we are exceeding some constraint in the HWA and the mmWaveLink is rejecting the changed parameter.
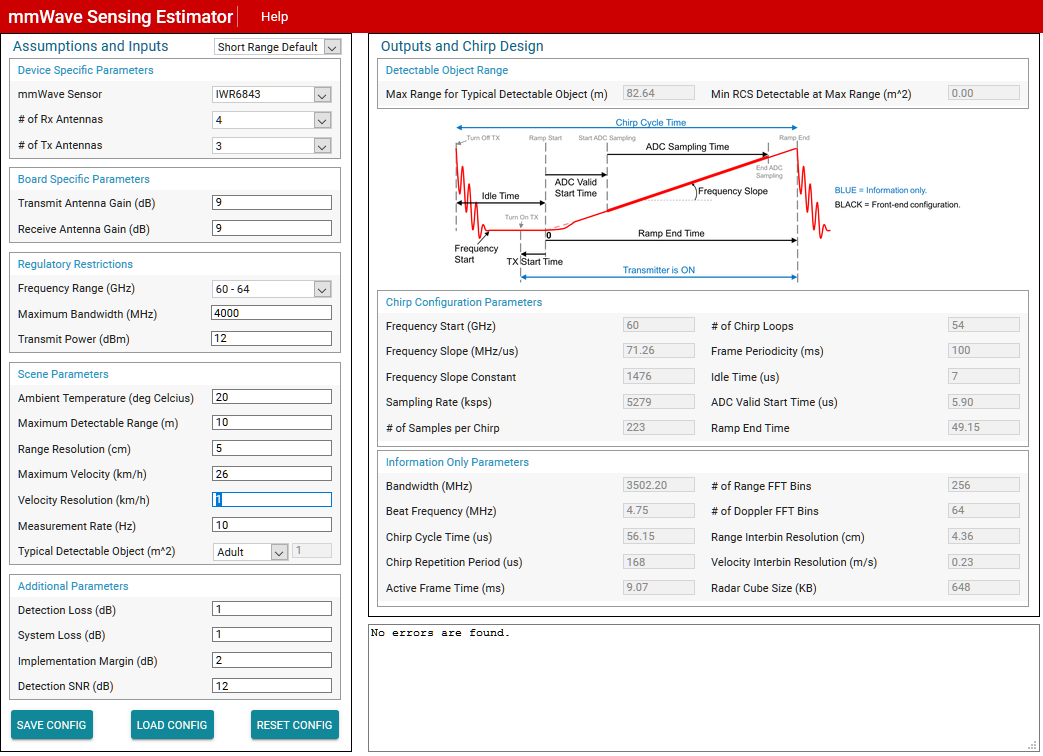
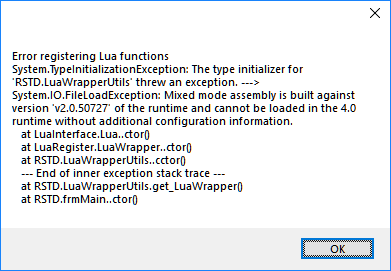
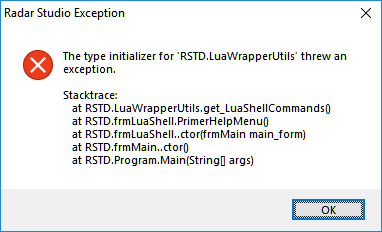
So hoping for a quicker path to our goal we decided to try the chirp timing parameter configuration calculator utility in Radar Studio. But when we run Radar Studio the RadarAPI tab never appears. We've installed multiple times, including all the related packages, MATLAB Runtime 8.5.1, National Instruments LabVIEW, MS C++ Runtime. We got the "Script Failed" error shown in the mmWave Studio GUI User's Guide and installed the High Speed Data Converter Pro although we don't have the TSW1400 board described. Next, an "error registering Lua functions". But we aren't doing raw data capture and just need the calculator. Our version says "mmWave Studio 2.0.0.2" and both the Help/About and the User's Guide have 2017 copyright dates.
Our goal is to determine chip parameters for the IWR6843, initially parameters that will be legal in the SDK 3.00.00.08 demo.
• Is the Ramp Timing Calculator or Chirp Timing Parameter Configuration Calculator available anywhere other than Radar Studio?
• Are the calculations documented elsewhere? I think in my searching I saw that they are not.
• With enough time we can figure out how our parameters are exceeding the HWA capacity, but is there a better way?
• Is the mmWave link code still beta? It has a 0.9.1 version and still includes design and requirements IDs, reviewer comments and code inspection references.
Thanks
Dan Lewis