


Part Number: PGA411Q1EVM
Hi there!
we are using the PGA411-Q1 EVM Evaluation Board with the encoder emulator output and do have a couple of questions.
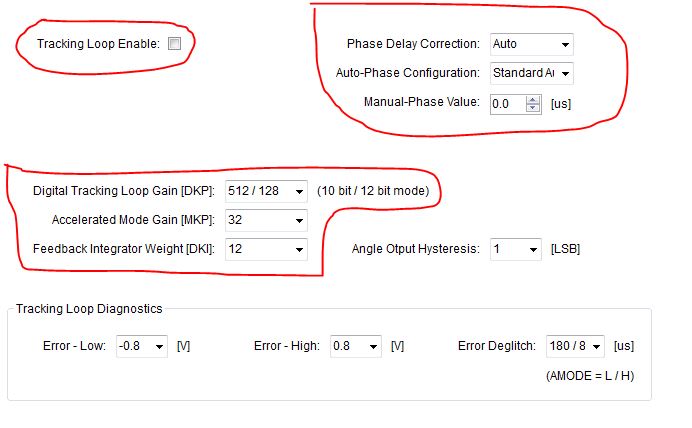
We are wondering about the settings of the Tracking Loop: If the tracking loop is disabled, the parameters (e.g. DKP) do still have an influence on the angular output quality. Why is that the case? Further, we would like to ask, what is the numerical meaning of the parameters DKP, MKP and DK (normally these are the control parameters), hence the numerical base is always two? Concerning the Phase Delay Correction, why is it always necesarry to be active and what is it good for? Is it related to the tracking loop?
Background information: we are planning to gauge a resolver type without an active tracking loop.
Thank you very much for your help so far!
Best regards,
Chris

