I am verifying the operation of GtrackLib created in C language using "tm_play.m" of traffic monitoring laboratory.
(The original tm_play.m does not correspond to the MEX function, but I modified it to correspond to the MEX function)
<<Conditions for verification>>
I did tracking with the following two GtrackLibs.
- Old GtrackLib : GtrackLib in "mmwave_sdk_02_00_00_04"
- New GtrackLib : GtrackLib in "mmwave_sdk_03_00_00_08" (implemented with 2DA option)
The files used for tracking are as follows.
- Point Cloud data : C:\ti\mmwave_industrial_toolbox_2_4_0\labs\lab0013_traffic_monitoring_16xx\gui\sample_fhist\fHistRT_0001.mat
- Configuration file : C:\ti\mmwave_industrial_toolbox_2_4_0\labs\lab0013_traffic_monitoring_16xx\chirp_configs\mmw_tm_demo_ph2.cfg
"Other Mandatory Parameters" set the following values.
- Initial Radial Velocity : -5
- Max Accel X : 0
- Max Accel Y : 4
<<Expected verification result>>
Since the inputs (ie, point cloud data and parameters) are exactly the same, the output (ie the tracking result) is the same.
<<Actual verification result>>
In old GtrackLib, tracking is done correctly for point clouds.
In the new GtrackLib, tracking is not done correctly for the point cloud.
"Incorrect" refers to the following.
- A plurality of tracking IDs are assigned to one vehicle.
- There are several bubbles that will not disappear.
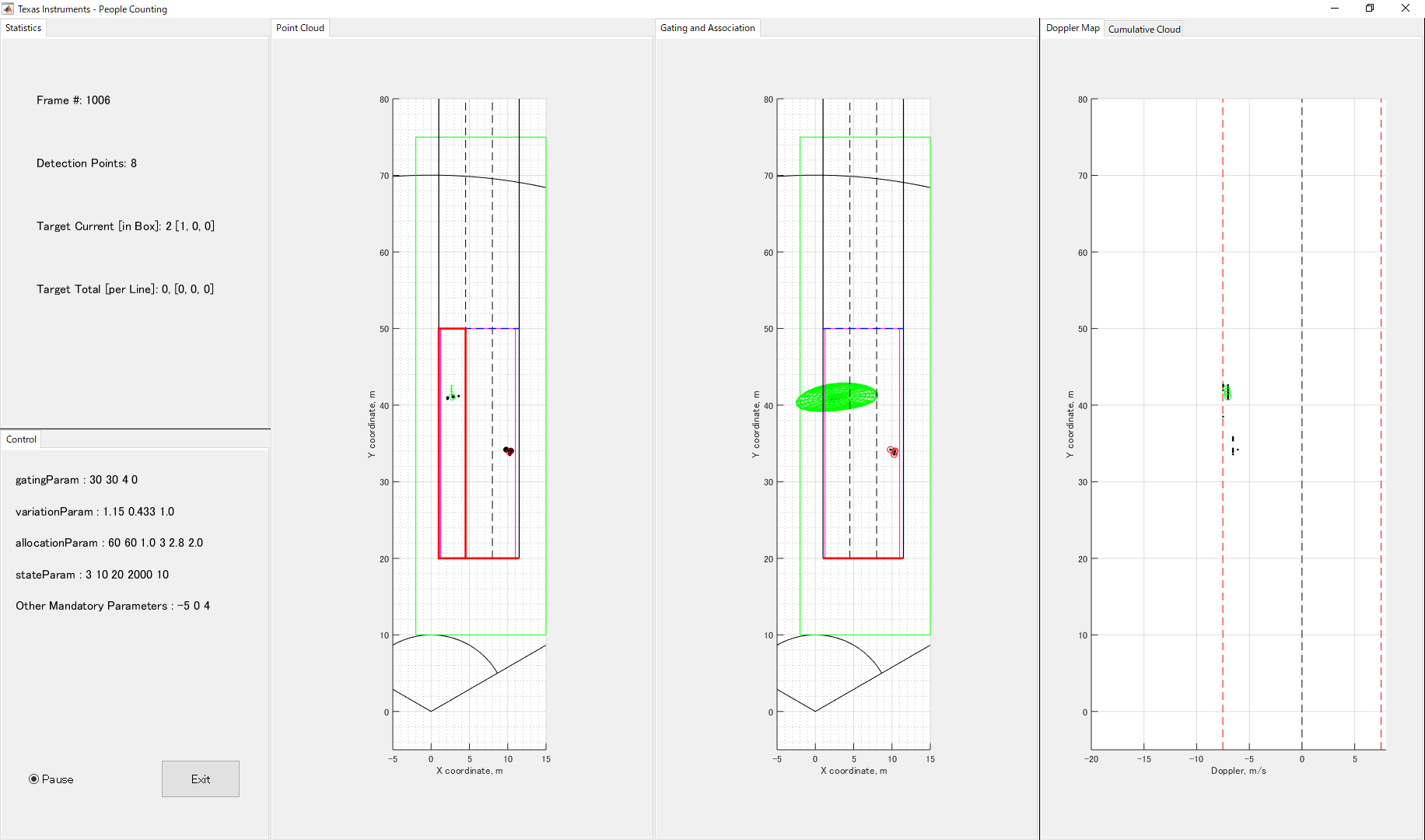
- Although the vehicle is running along the Y axis, the shape of the bubble is laterally elongated.
However, considering the distribution of point clouds, it may be appropriate to lengthen horizontally.
In that case, it is inappropriate that the bubble of the old GtrackLib is long vertically.
<<Question>>
I want to obtain the same tracking result as the old GtrackLib when using the new GtrackLib.
So, what should I do?
Do I need to modify the parameters for the new GtrackLib?
Do I have to port the algorithm contained in the old GtrackLib to the new GtrackLib?
Anyway, is the new GtrackLib incomplete?
Thanks.