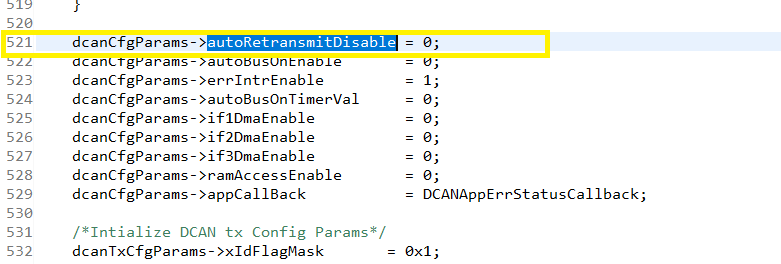
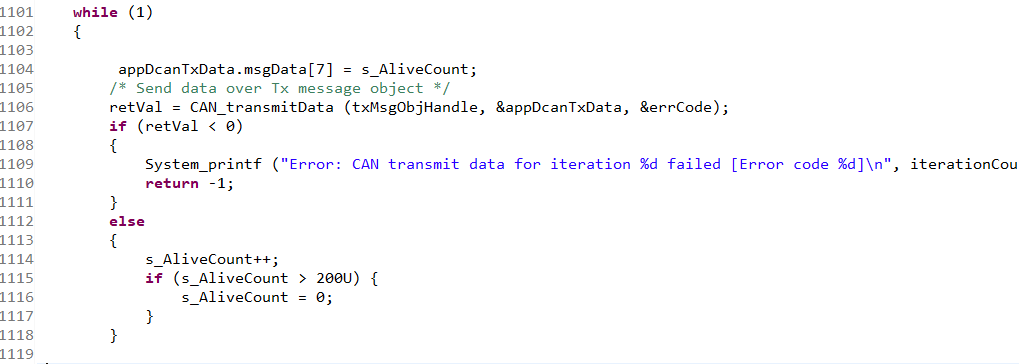
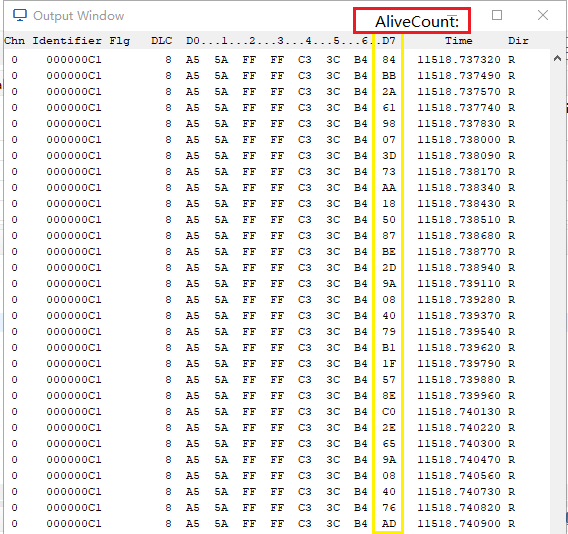
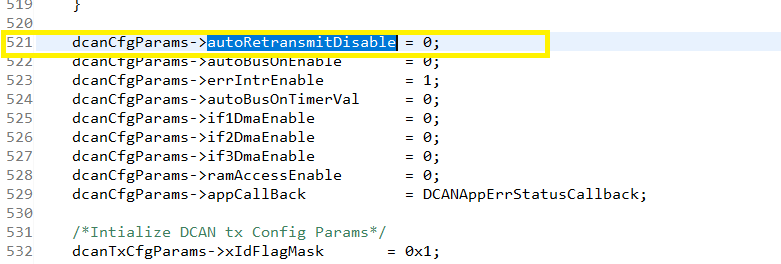
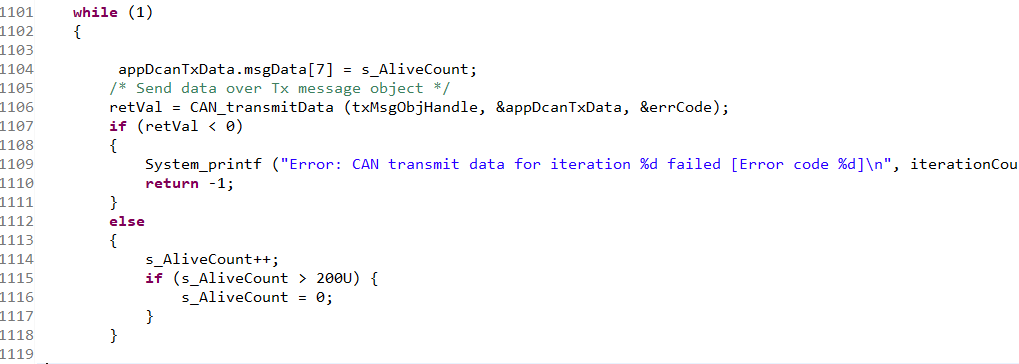
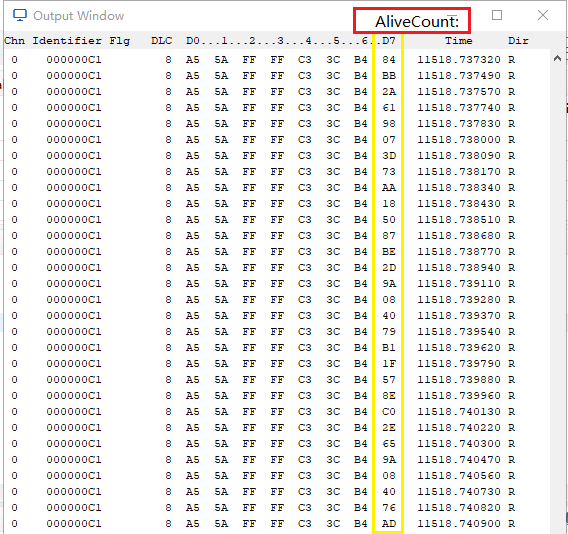
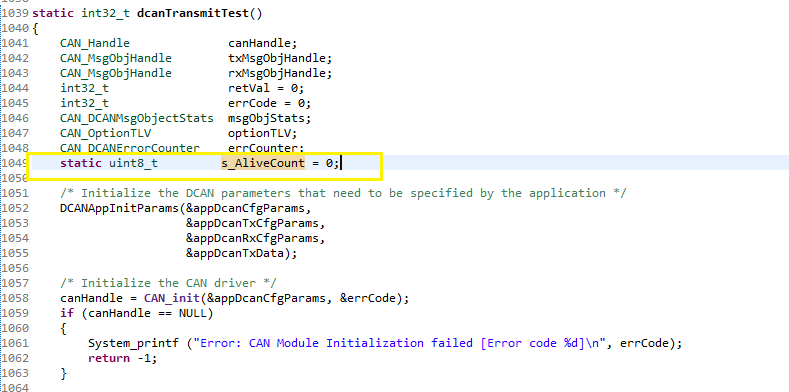
The AWR1642 uses the SDK2.00.00.04 to debug the CAN module. When the CAN data is continuously transmitted, the receiving device finds that the CAN data is discontinuous and the frame loss occurs. However, the Busy bit of the IF1CMD Register of the DCAN is not set during the whole process. It is not possible to determine if the CAN data can be successfully transmitted by the Busy bit. I would like to ask how to solve this situation of sending CAN data discontinuity?

-
Ask a related question
What is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.