


Other Parts Discussed in Thread: AWR1642,
Tool/software: WEBENCH® Design Tools
hello,
i'm trying to get raw data from demo visualizer from button log start here :  then here the file .csv that i got :
then here the file .csv that i got :
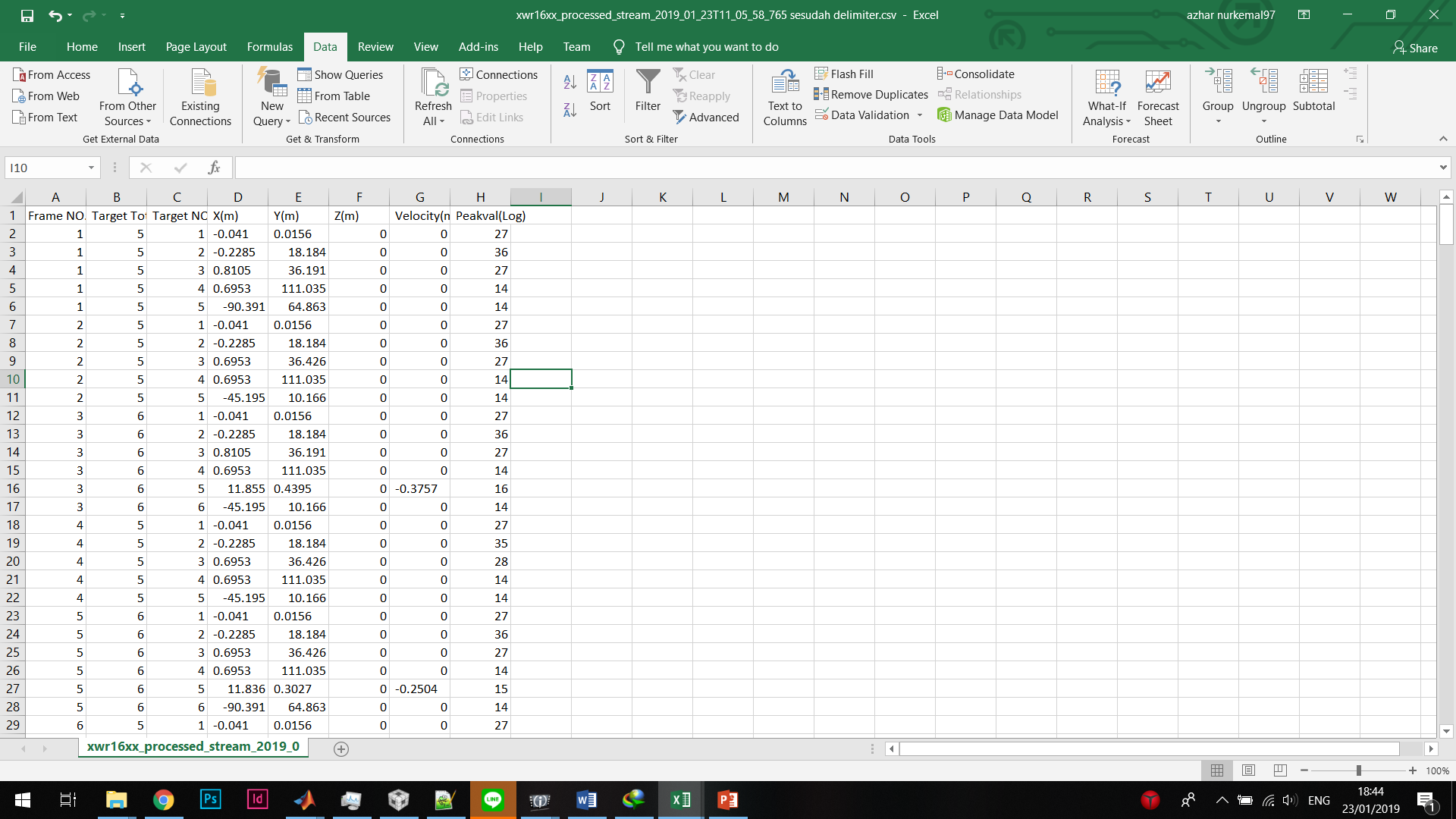
the problem is the data above is not accurate enough for tracking object. we tried using only 2 human motions but the data get target randomly, its hard to know which target number(Target NO.) for representation 2 humans.
my question :
1) how does AWR1642 algorithm recognize any object as human like demo GUI from here "C:\ti\mmwave_industrial_toolbox_3_1_0\labs\lab0011-pplcount\lab0011_pplcount_quickstart\pplcount_gui.exe"?
2) can i use that file (.csv) or get another data from AWR1642BOOST as input for Machine learning/ Deep learning to implement that algorithm for people detection/counting ? if there is another data that i can use for human detection/counting how can i get them only using AWR1642BOOST?

