Hi,
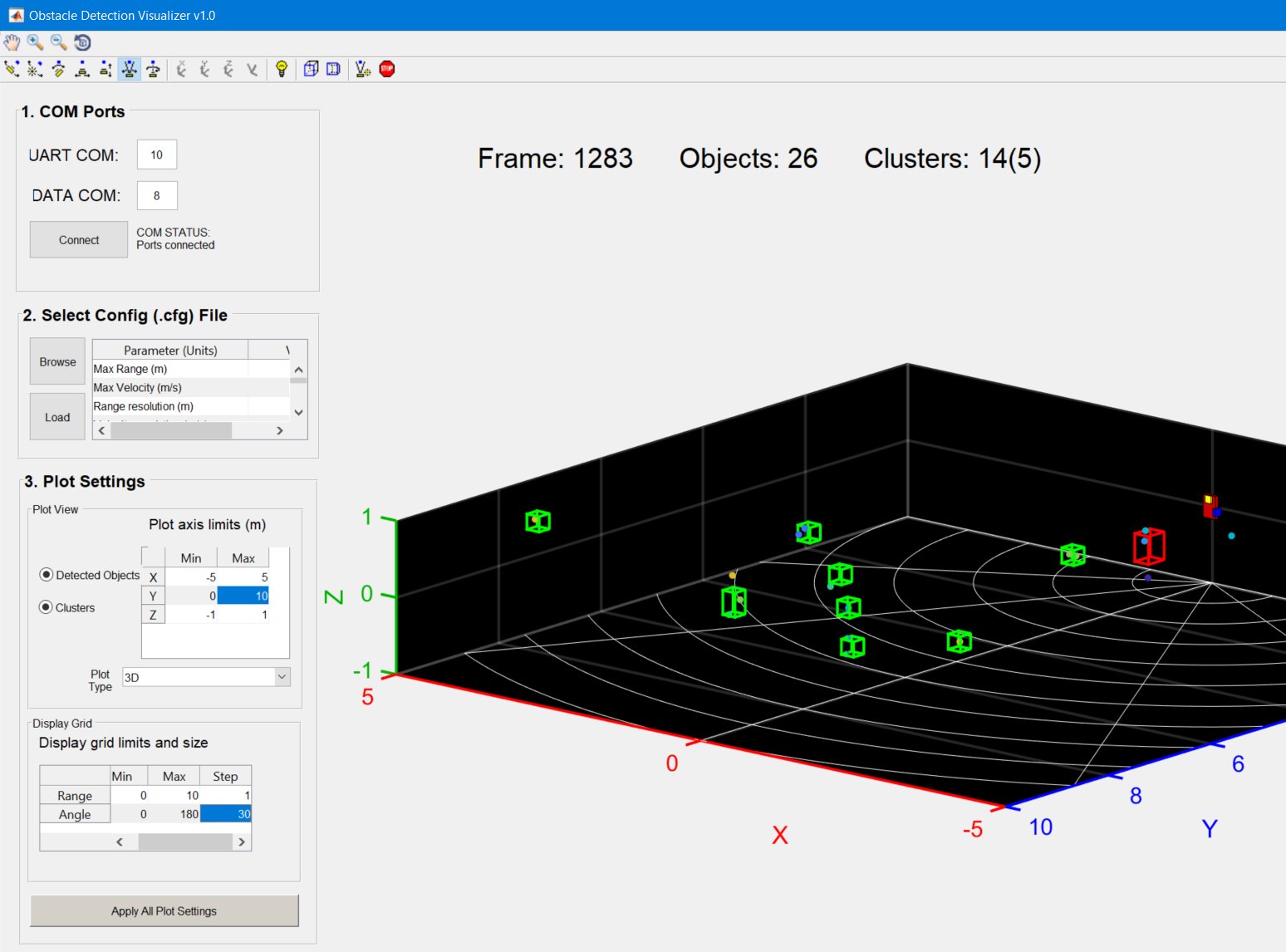
We are using Obstacle Detection lab from Automative Toolbox V2.4.7. with AWR1642-ODS EVM revA. Our physical system setup is similar to the setup shown in the Obstacle Detection Lab.
While acquiring 3D data, maximum detection range of the device is restricted with 4 meters. However, if we try to use the Short Range Radar lab from Automative Toolbox V2.4.7 for 2D obstacle detection, maximum detection range of the device is increased to approximately 20 meters.
Can you please guide us to enhance maximum detection range of the device in 3D configuration.
Best regards,
Aytac Kahveci