Tool/software: Linux
I tried to through the contrast between the two times the change of the point cloud to get posture change of millimeter wave radar,when I slowly moved the millimeter-wave radar, I recorded a lot of coordinate information of the point cloud of frames with a frequency of 21Hz, but the point cloud of before and after frames changed a lot, which was almost impossible to match. May I ask how can I make the point cloud information more accurate, or make the obtained point cloud more dense? In addition, I completed the point cloud information collection in the office.
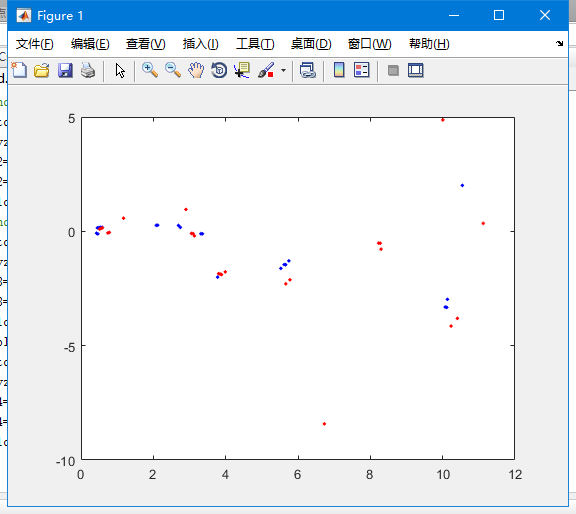
This is the point cloud of before and after frames I drew in matlab: