



Other Parts Discussed in Thread: UNIFLASH
I am debuging the canFd module base on SDK2.0. In the CAN initialization, the system will halt if there are a CAN node which is sending CAN message with same baud rate.
I want to find the reason by GPIO, so I edit canfd.c in this way:

GPIO2 will output high level if write 0. I want to output 1,2,3,4 pulses in sequence, but it halts after outputing 3 pulses:
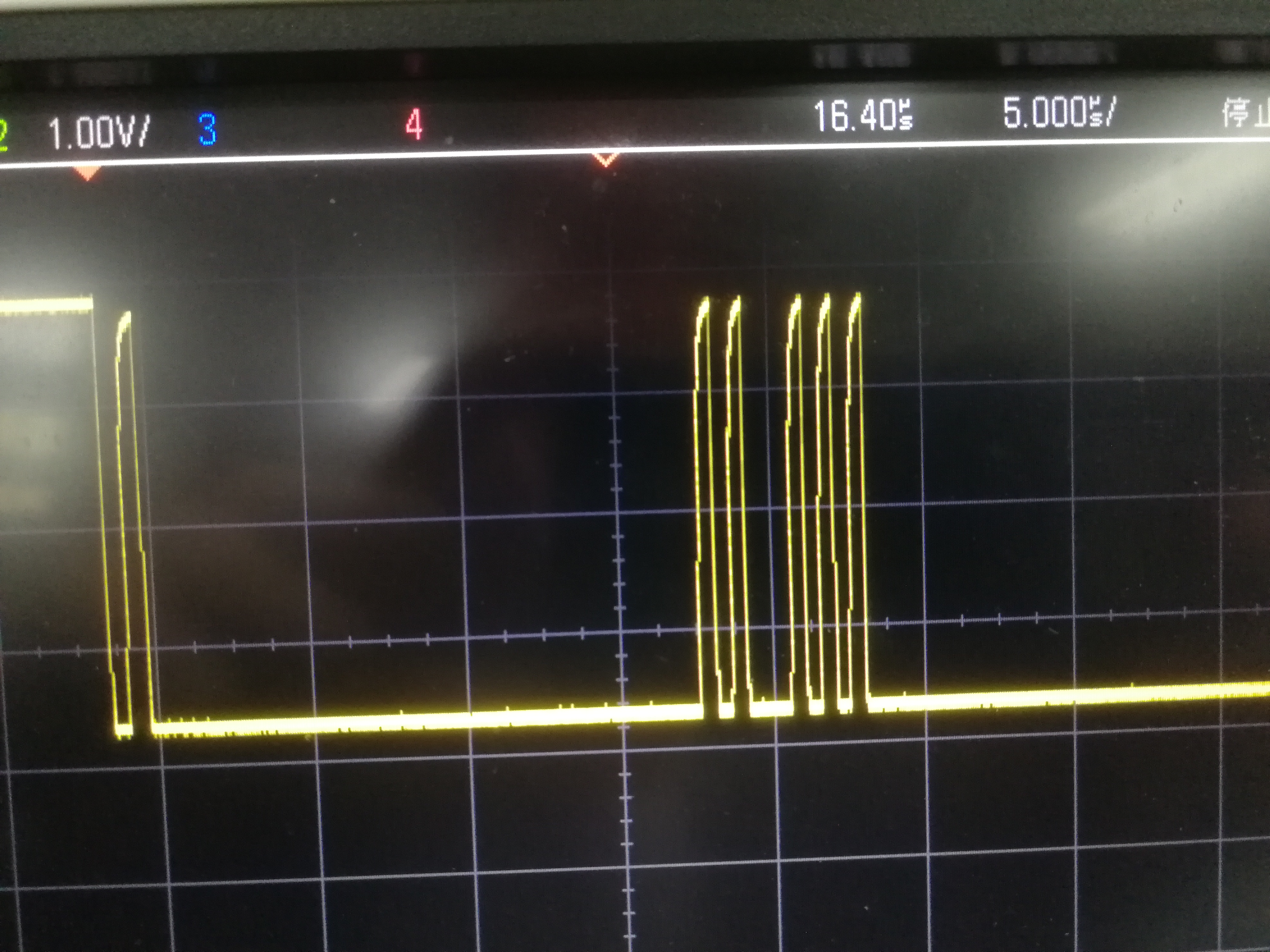
so, I think, it halt after HwiP_create(). This problem occurs sometimes rather than everytime. by the way, I can confirm CANFD_MCANInt0Isr do not execute this moment.
Can someone tell me the reason? thank you!!!

