Greetings,
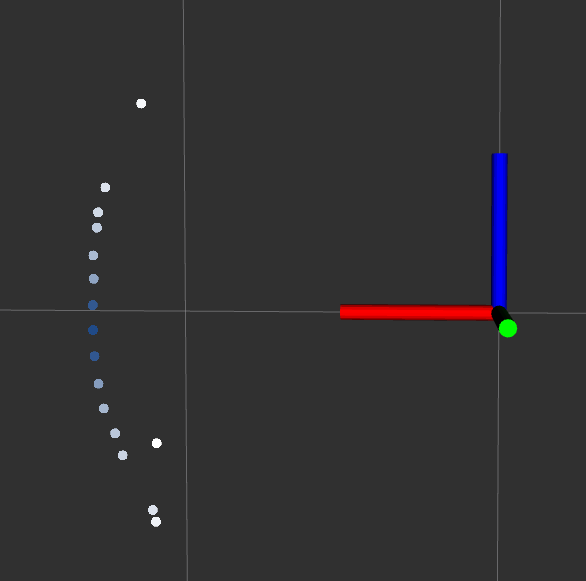
When using the board awr1443boost (sdk 1.2.0.5) with ROS, and representing the received point to RVIZ, I noticed that the points that should represent a flat surface across the elevation (z axis), appear to be curved as if it is detecting some kind of dome. To represent this points, the cartesian coordinates are used.
Is there any explanation to this phenomenon?
Best Regards,
Edgar