Tool/software: TI C/C++ Compiler
Hi
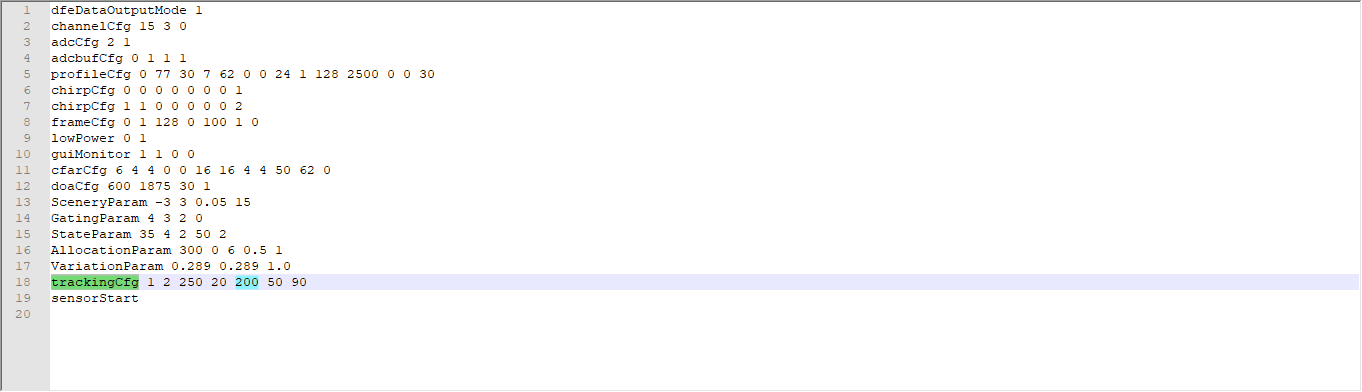
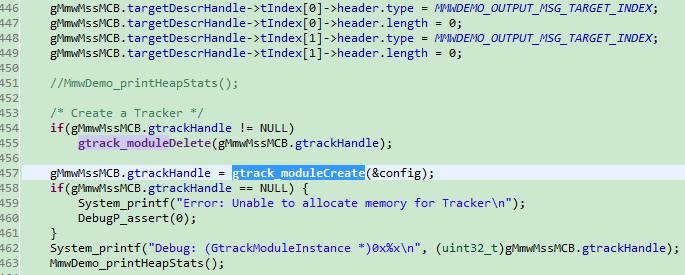
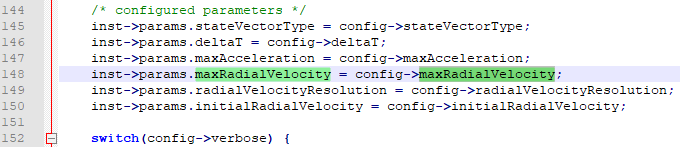
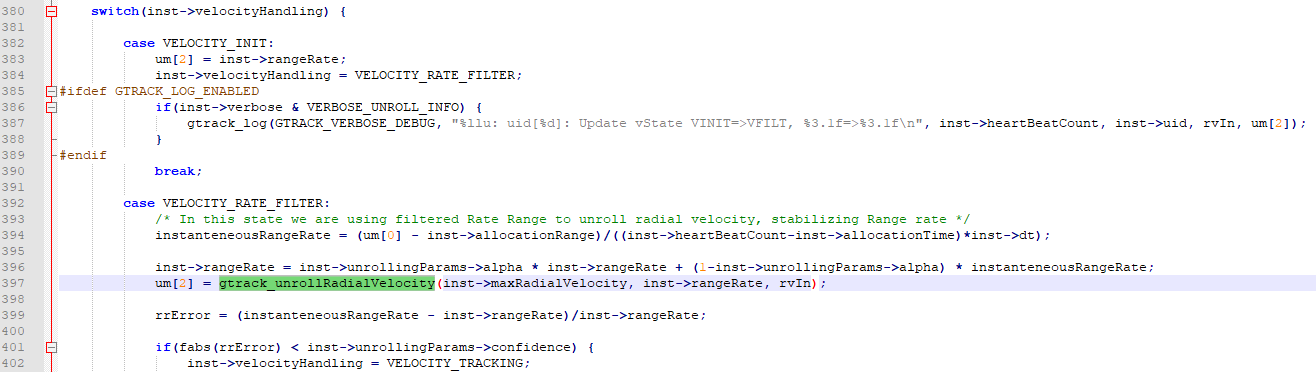
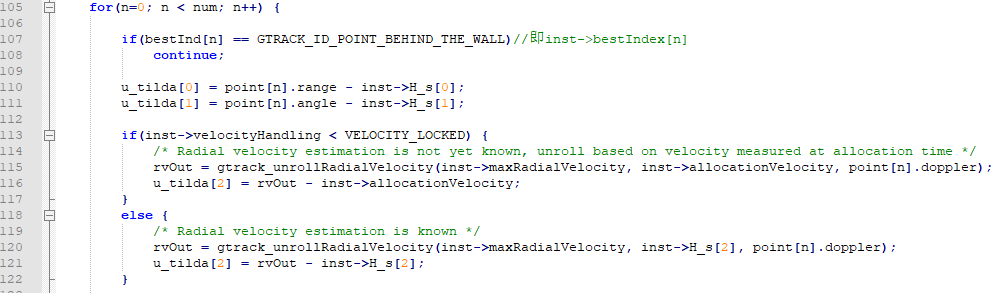
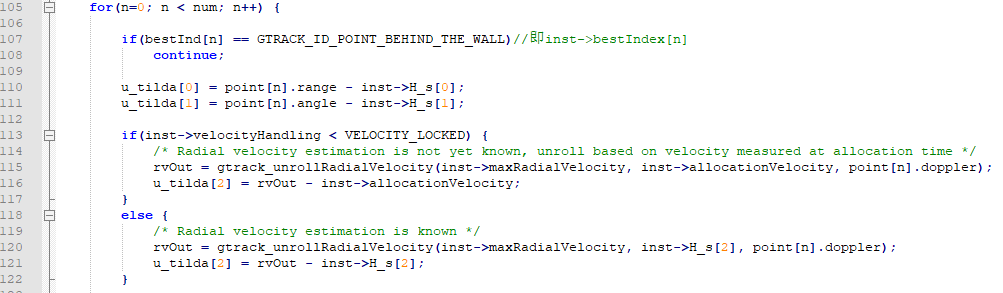
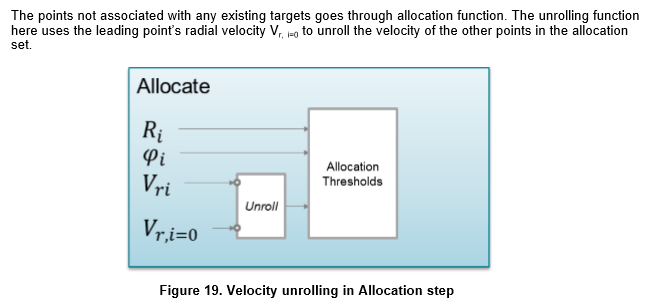
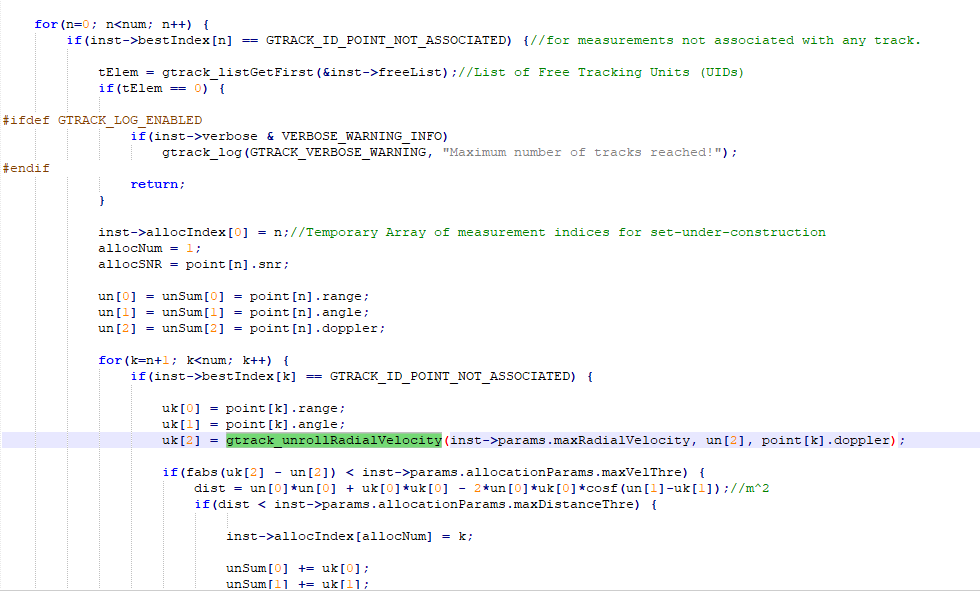
I am learning the code about GTRACK Algorithm.In the The imlementation of gtrack_moduleAssociate function, gtrack_unrollRadialVelocity is used to unroll radial velocity from +/- rvMax form based on expectation velocity value.I feel confused why we need to do that.And in the declaration of gtrack_unrollRadialVelocity function,when rvExp is larger than rvIn,we do 'rvExp+rvMax'?

There must be anything I made mistake.
Thanks,
Hanna