Tool/software: TI-RTOS
An I2C sensor is running well and looping in Sensor Controller Studio as shown below: initialization code, and task looping logic. SCS code is exported and compiles in CCS. The CCS program load triggers the same initialization logic as does the SCS initialization logic. However, I cannot start the task loop in CCS. I2C remains quiet, and no active logic is occuring with I2C. The 'sensor controller studio project from scratch' ADC task is working fine. (FYIO there is a typo in the lab manual - screen shot below)

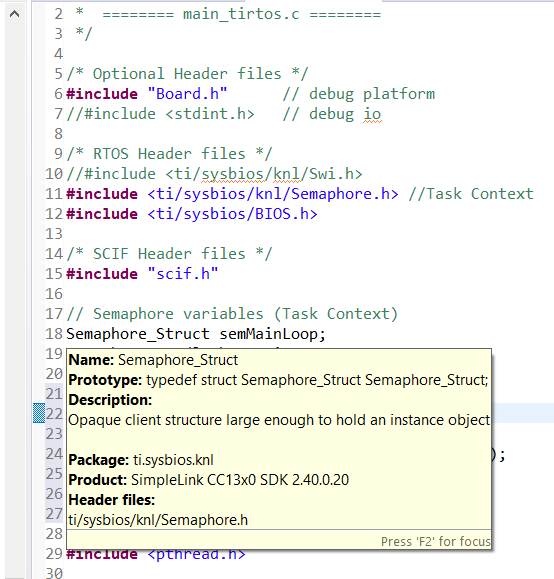
Sensor Controller Studio Initialization Code
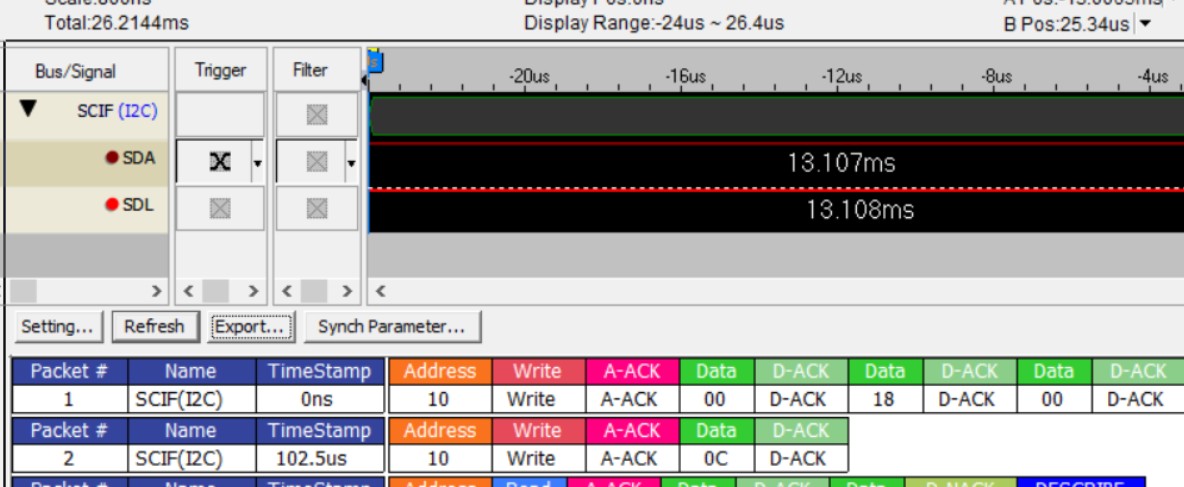
Code Composer Studio program load
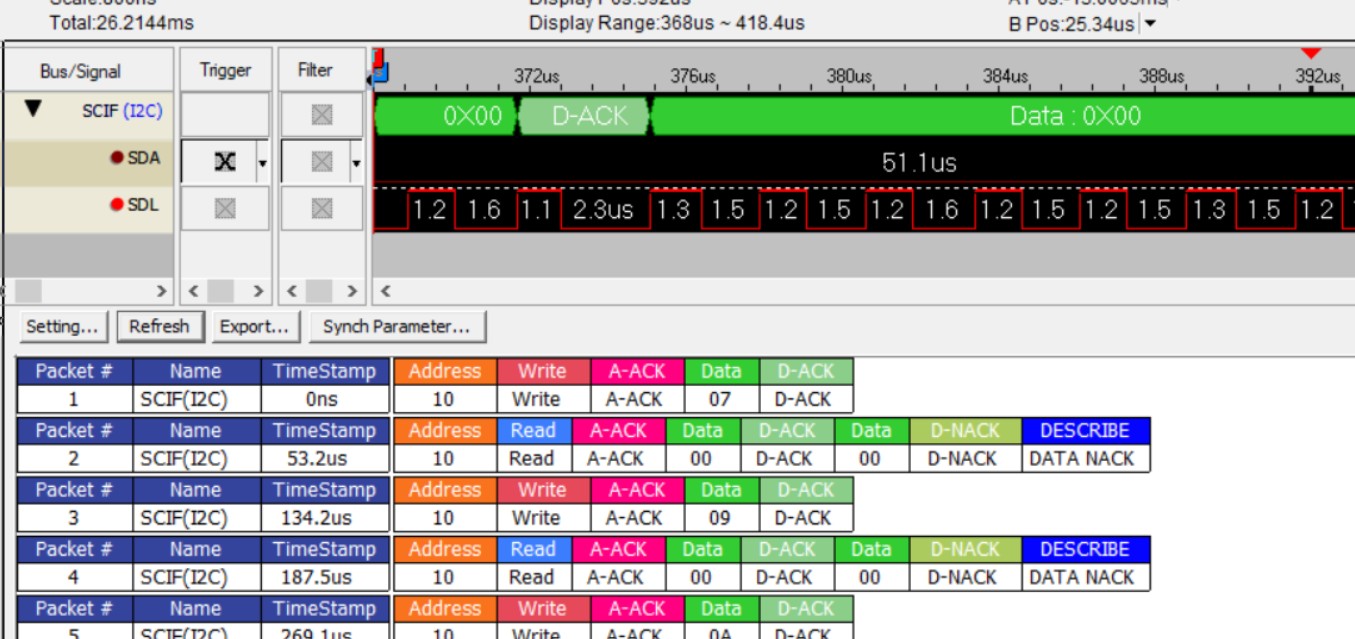
Sensor Controller Studio - running task
(there is a typo in the tutorial.... main_tirtos.c file should be 'empty.c' instead. )