

Tool/software: Linux
hi
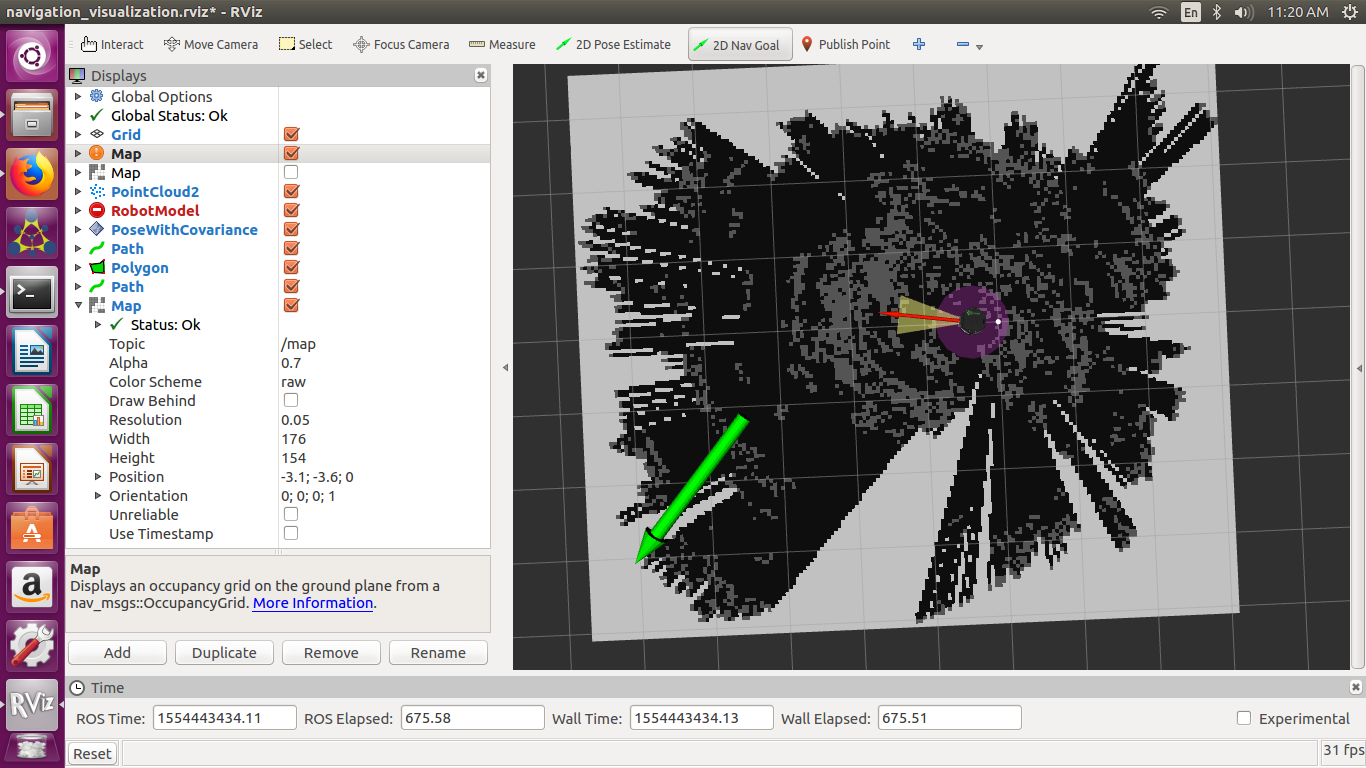
i have done a mapping using mmwave sensor for my inbuilt robot.
but when i do autonavigation, robot is not moving after give 2d nav goal. pls help.
screenshot attached for the reference


This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
Tool/software: Linux
hi
i have done a mapping using mmwave sensor for my inbuilt robot.
but when i do autonavigation, robot is not moving after give 2d nav goal. pls help.
screenshot attached for the reference

