Hello TI Team,
I am working with TDC1000 where my goal is to measure ToF using Piezo ceramic transducer 1MHz. I am following snaa270.pdf application report (Using Ultrasonic Sensing to Monitor Level in Tanks) to test that my circuit and sensor is working properly, but no matter how far is my object from the transducer ToF is not changing. That it would be more clear that's what i did:
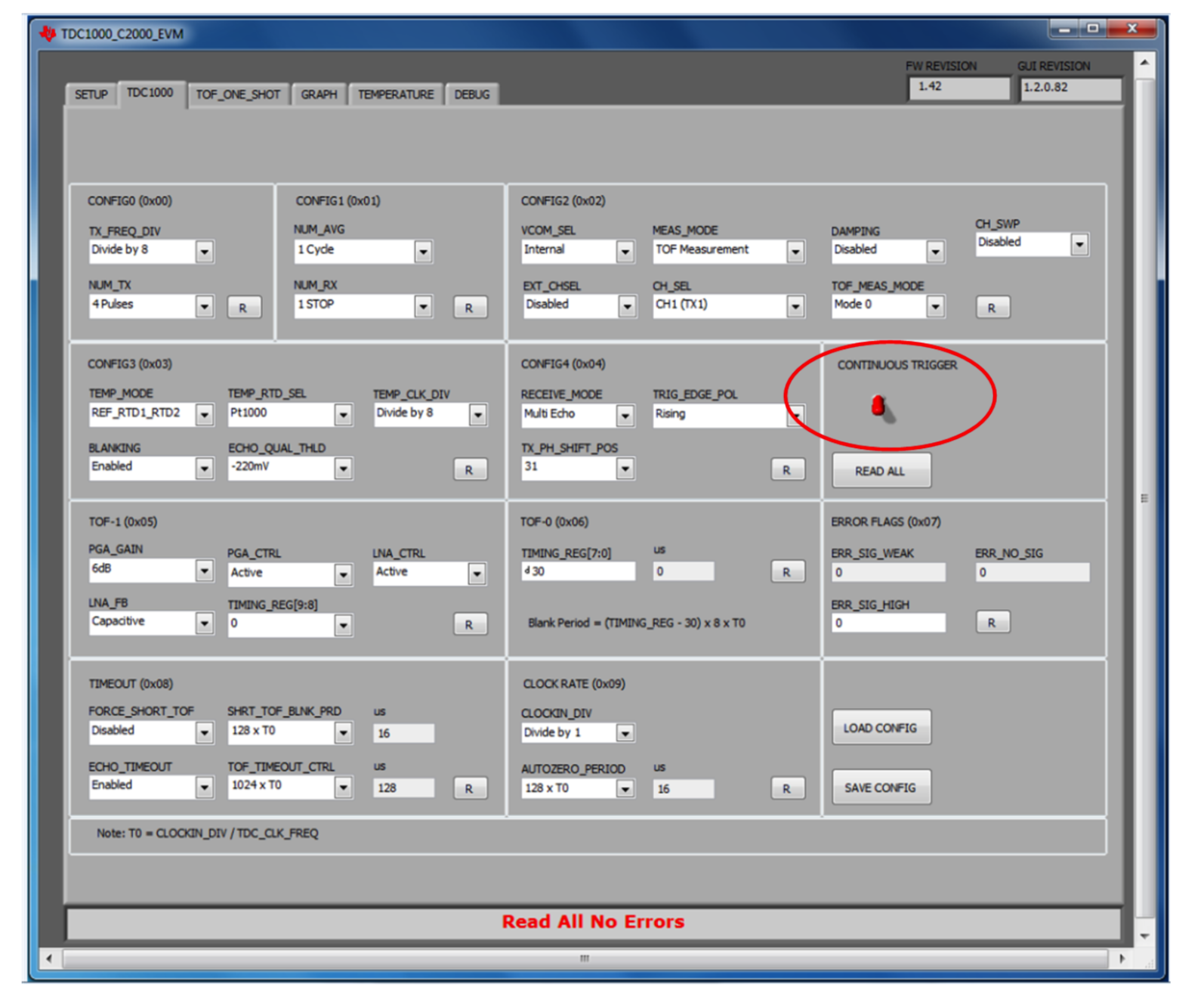
1) Configured registers for TDC1000 using SPI protocol. Register values can be seen below. (NOTE: I was not using TI GUI. Values was uploaded manually)
CONFIG_0
RAW: 0x44
TX_FREQ_DIV: 8
NUM_TX: 4
CONFIG_1
RAW: 0x41
NUM_AVG: 1
NUM_RX: 1
CONFIG_2
RAW: 0x0
VCOM_SEL: INT
MEAS_MODE: TOF
DAMPING: OFF
CH_SWP: OFF
EXT_CHSEL: OFF
CH_SEL: 1
TOF_MEAS_MODE: 0
CONFIG_3
RAW: 0xC
TEMP_MODE: REF, RTD1, RTD2
TEMP_RTD_SEL: PT1000
TEMP_CLK_DIV: 8
BLANKING: ON
ECHO_QUAL_THLD: -220 mV
CONFIG_4
RAW: 0x5F
RECEIVE_MODE: MULTI ECHO
TRIG_EDGE_POLARITY: RISING
TX_PH_SHIFT_POS: 31
TOF_1
RAW: 0x40
PGA_GAIN: 6 dB
PGA_CTRL: ON
LNA_CTRL: ON
LNA_FB: CAPACITIVE
TIMING_REG[9:8]: 0
TOF_0
RAW: 0x1E
TIMING_REG[9:0]: 30
ERROR_FLAGS
RAW: 0x0
ERR_SIG_WEAK: 0
ERR_NO_SIG: 0
ERR_SIG_HIGH: 0
TIMEOUT
RAW: 0x23
FORCE_SHORT_TOF: OFF
SHORT_TOF_BLANK_PERIOD: 128 x T0 -> 1600.00 us
ECHO_TIMEOUT: ON
TOF_TIMEOUT_CTRL: 1024 x T0 -> 12800.00 us
CLOCK_RATE
RAW: 0x1
CLOCKIN_DIV: 1
AUTOZERO_PERIOD: 128 x T0 -> 1600.00 us
TOF Control: Standard TOF
with blanking
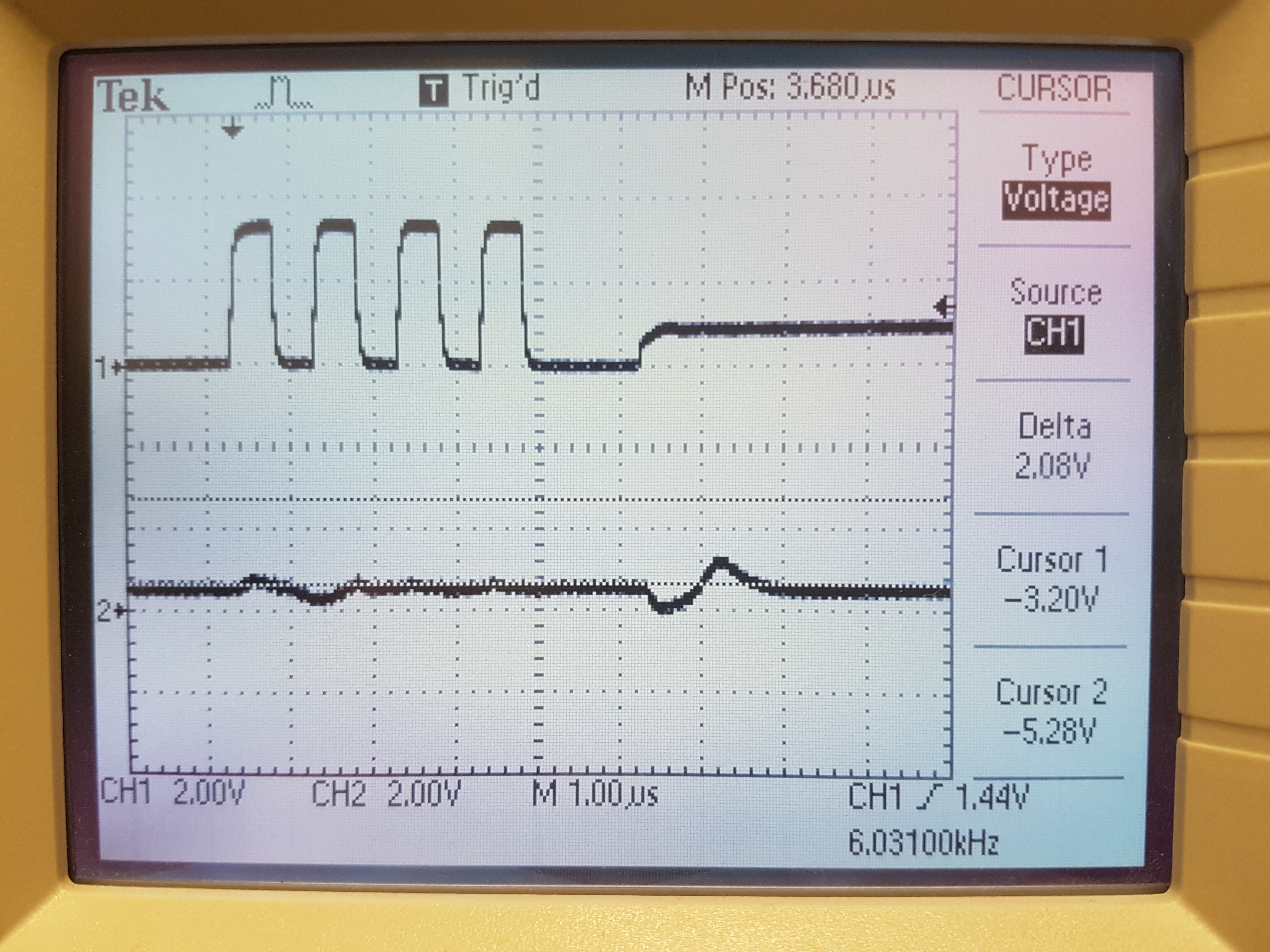
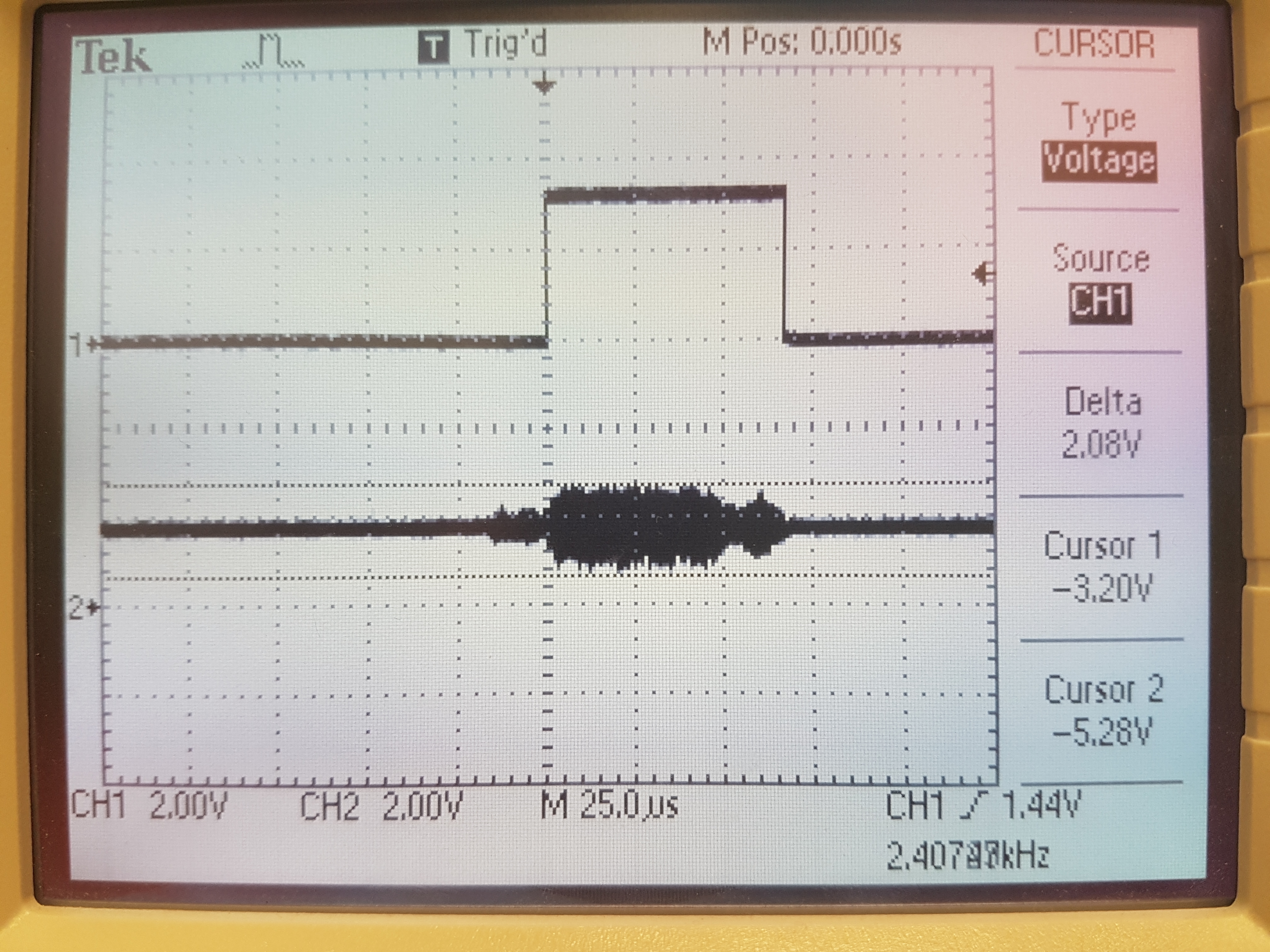
2) Measured Start, Stop & Compin with osciliscope.
CH1 START CH2 COMPIN
CH1 START CH2 STOP
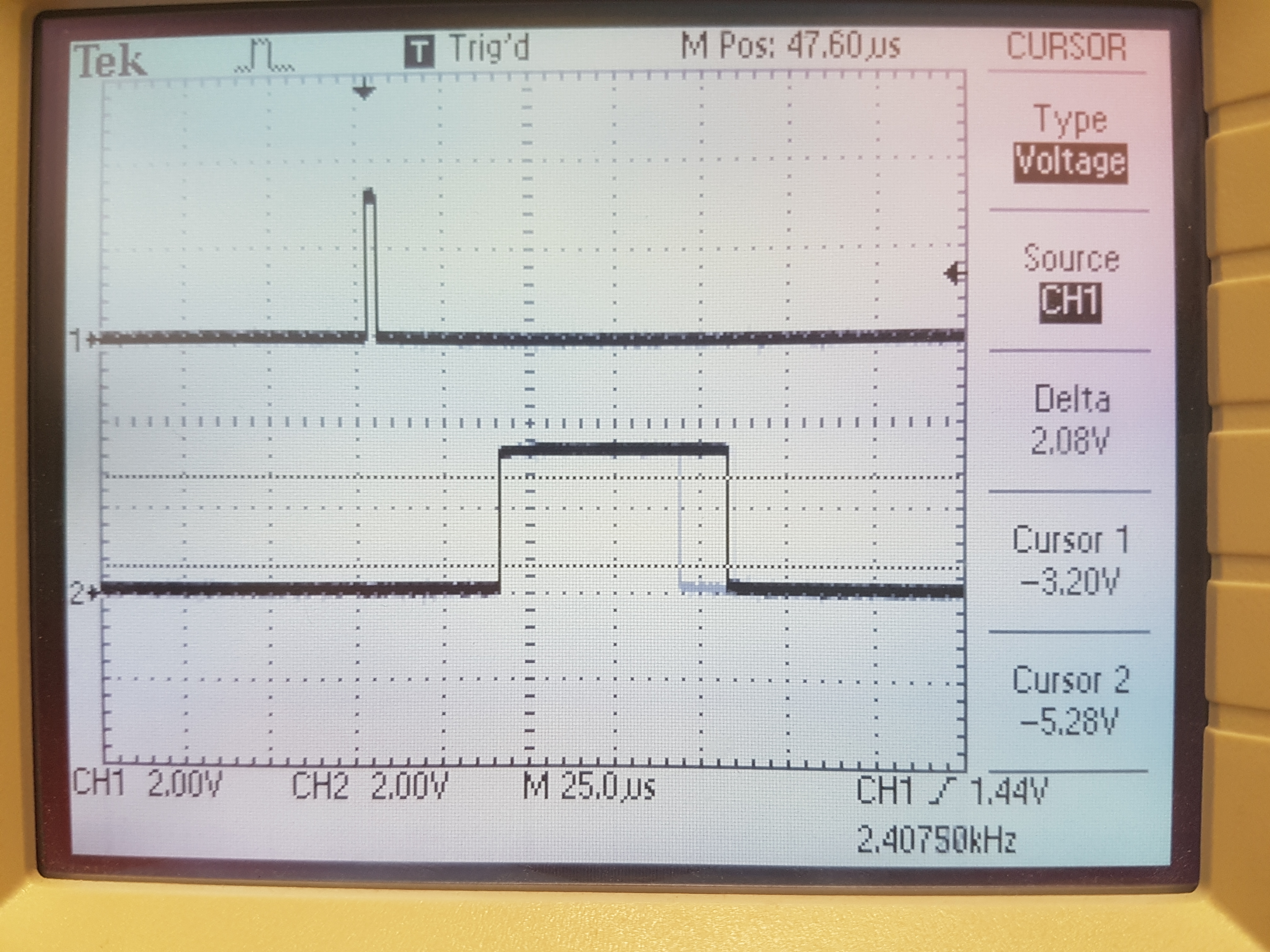
CH1 STOP CH2 COMPIN
3) Tried to move object closer to the transducer and further graphs stays the same.
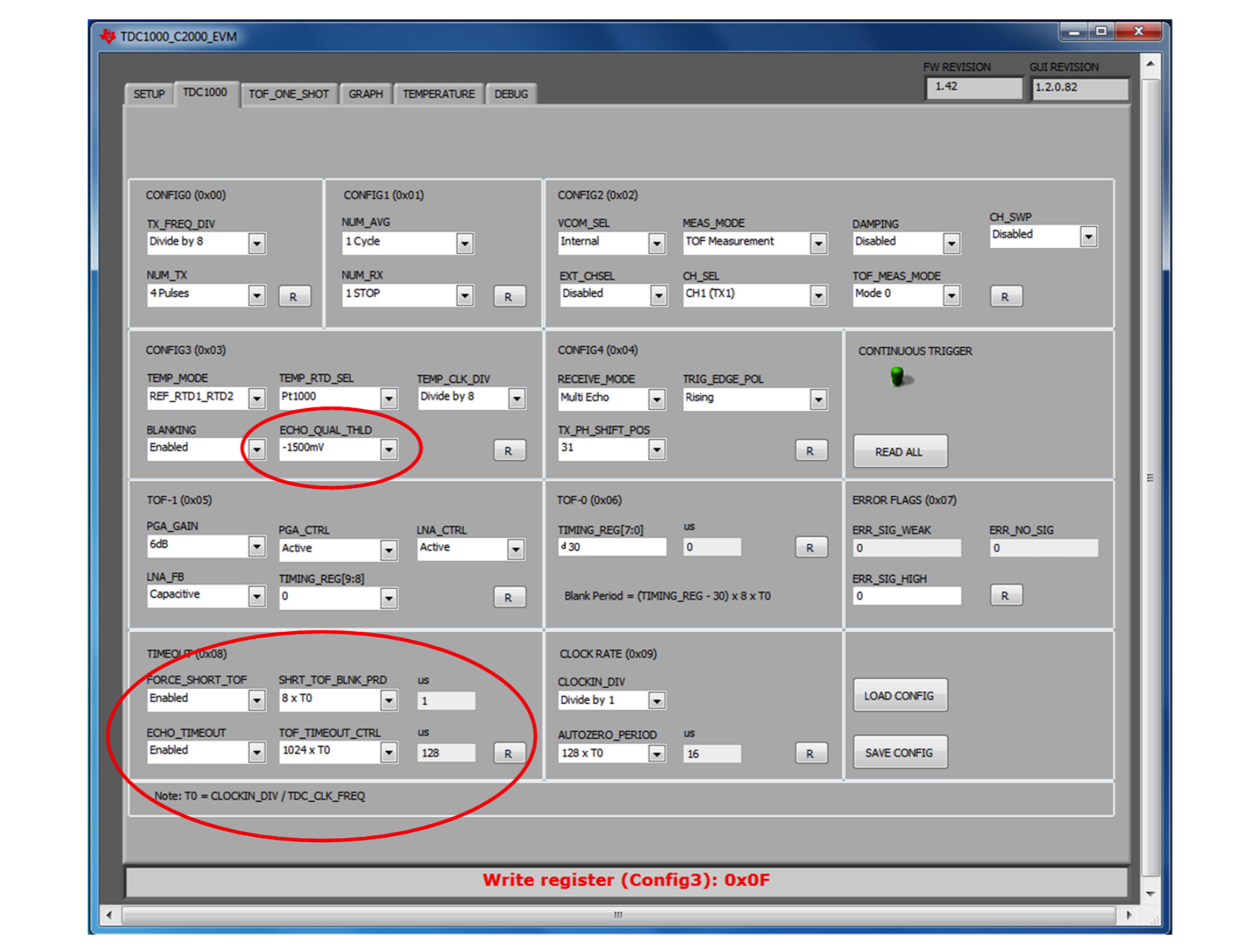
4) Continued with snaa270.pdf and changed register values of TDC1000.
CONFIG_0
RAW: 0x44
TX_FREQ_DIV: 8
NUM_TX: 4
CONFIG_1
RAW: 0x41
NUM_AVG: 1
NUM_RX: 1
CONFIG_2
RAW: 0x0
VCOM_SEL: INT
MEAS_MODE: TOF
DAMPING: OFF
CH_SWP: OFF
EXT_CHSEL: OFF
CH_SEL: 1
TOF_MEAS_MODE: 0
CONFIG_3
RAW: 0xF
TEMP_MODE: REF, RTD1, RTD2
TEMP_RTD_SEL: PT1000
TEMP_CLK_DIV: 8
BLANKING: ON
ECHO_QUAL_THLD: -1500 mV
CONFIG_4
RAW: 0x5F
RECEIVE_MODE: MULTI ECHO
TRIG_EDGE_POLARITY: RISING
TX_PH_SHIFT_POS: 31
TOF_1
RAW: 0x40
PGA_GAIN: 6 dB
PGA_CTRL: ON
LNA_CTRL: ON
LNA_FB: CAPACITIVE
TIMING_REG[9:8]: 0
TOF_0
RAW: 0x1E
TIMING_REG[9:0]: 30
ERROR_FLAGS
RAW: 0x0
ERR_SIG_WEAK: 0
ERR_NO_SIG: 0
ERR_SIG_HIGH: 0
TIMEOUT
RAW: 0x43
FORCE_SHORT_TOF: ON
SHORT_TOF_BLANK_PERIOD: 8 x T0 -> 100.00 us
ECHO_TIMEOUT: ON
TOF_TIMEOUT_CTRL: 1024 x T0 -> 12800.00 us
CLOCK_RATE
RAW: 0x1
CLOCKIN_DIV: 1
AUTOZERO_PERIOD: 128 x T0 -> 1600.00 us
TOF Control: Short TOF
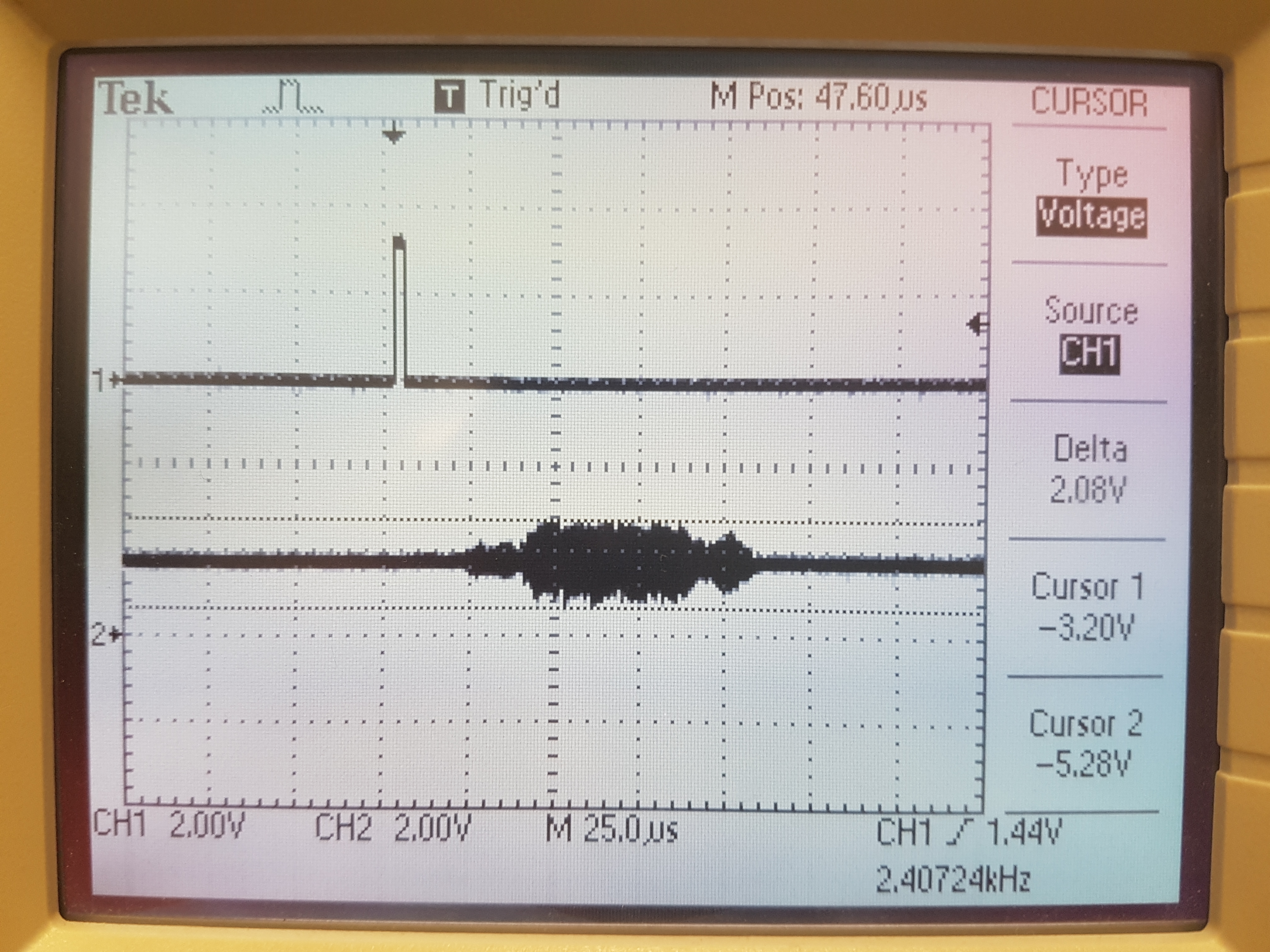
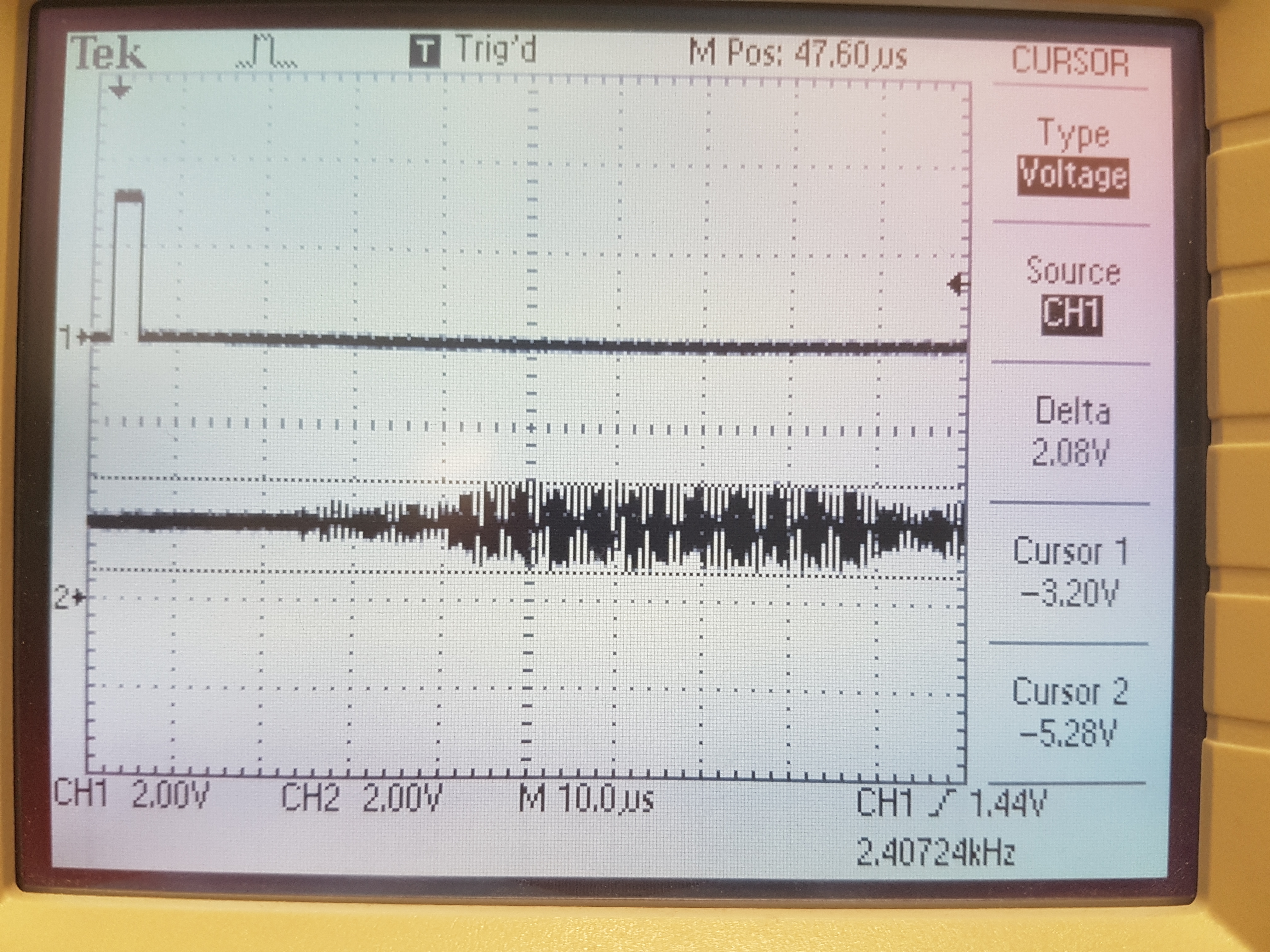
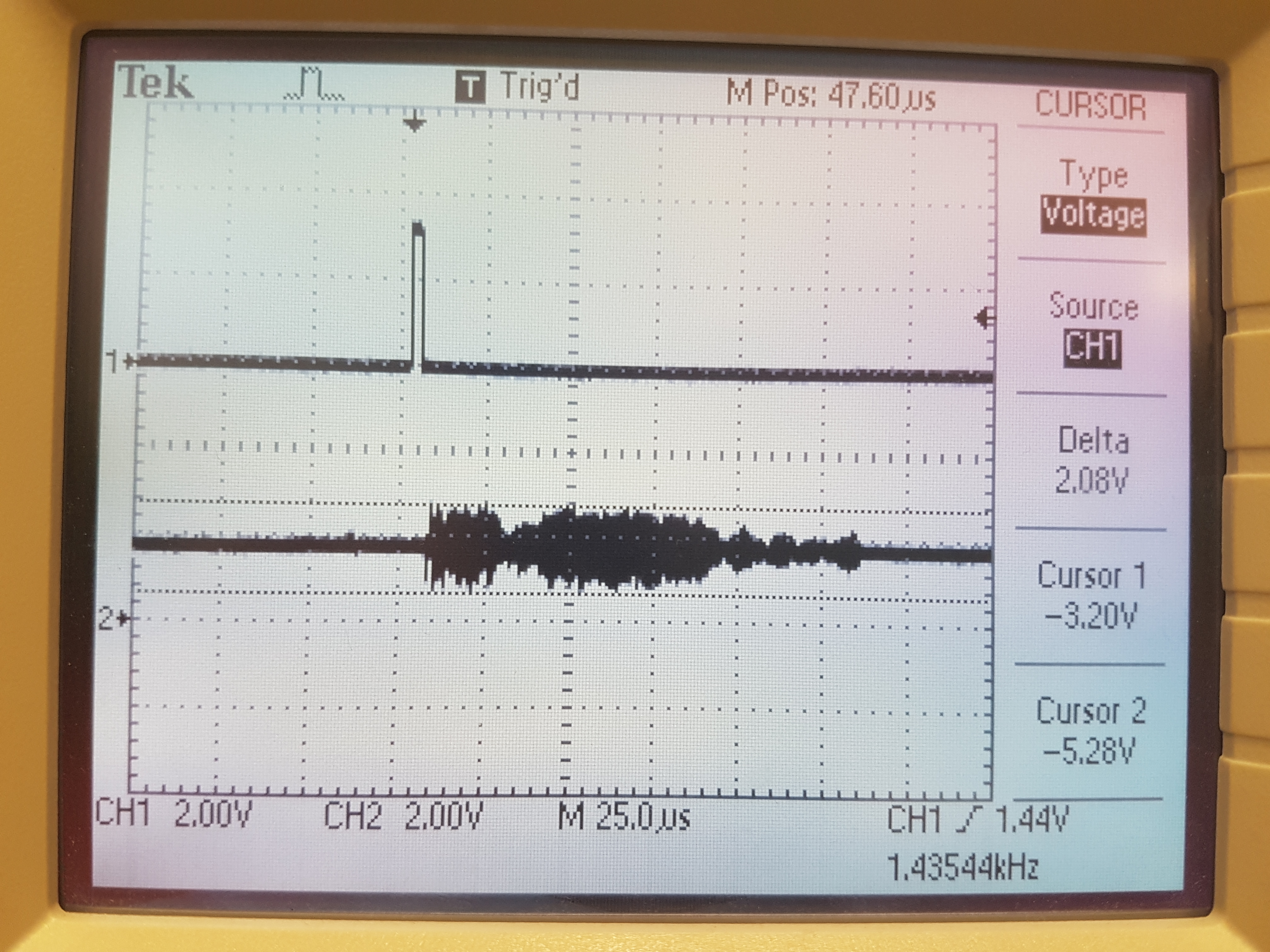
5) Measured Start and COMPIN
CH1 START CH1 COMPIN
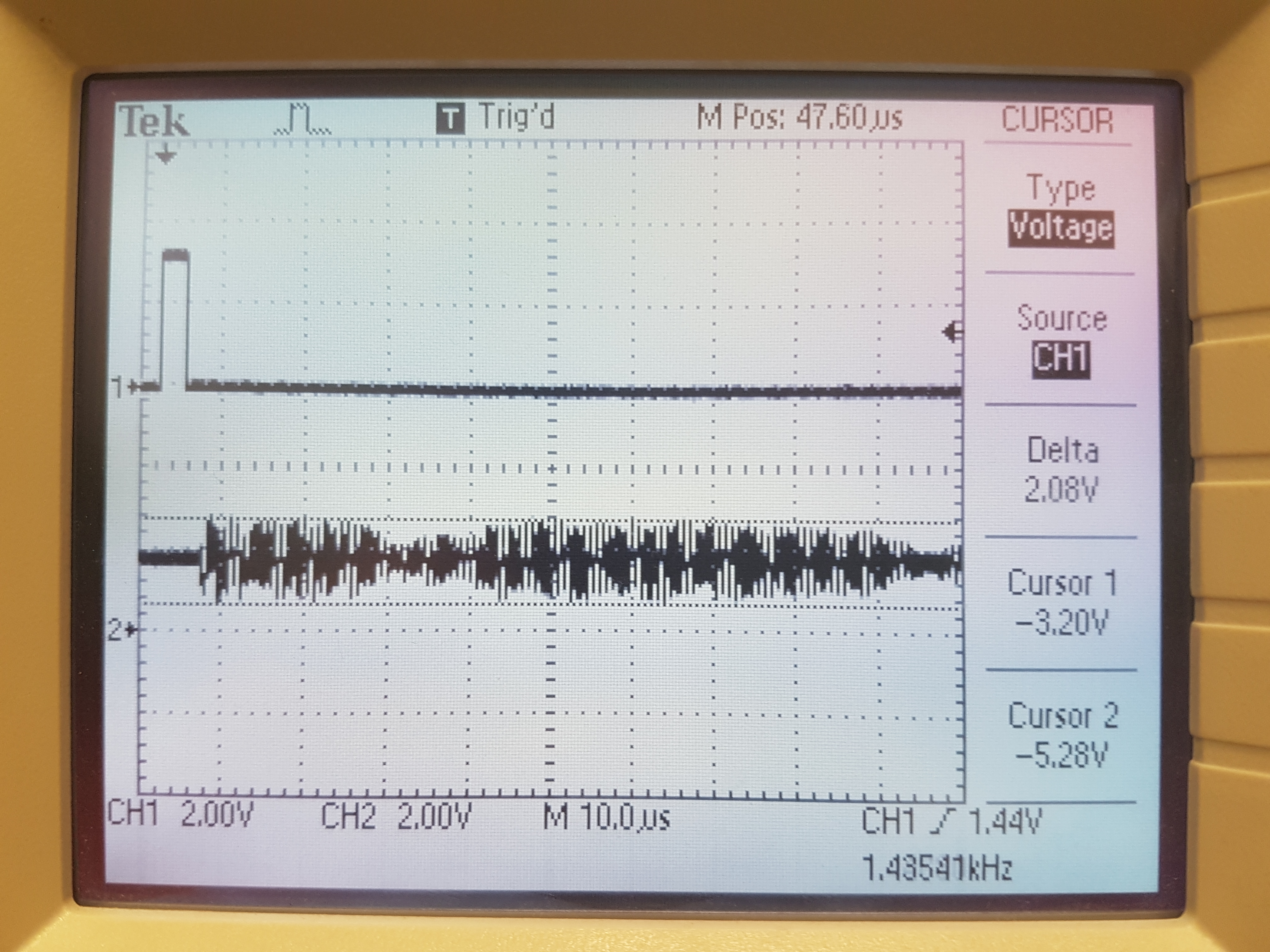
This measurements i did just to test that my transducer and circuit is working properly before glueing transducer to the tank. So between object and transducer there is an air instead of water. I assume that ToF still should vary depending on the distance between transducer and object. Thank you.
Kind regards,
Gytis