Other Parts Discussed in Thread: FDC2112, , FDC2114
Hi,
I would like to use a capacitance sensor for detection of a person present at a distance of 10 to 50mm.
FDC2112/14 seemed to be a good solutoin, so I ordered the Evaluation Board.
For the first tests I use a round aluminum foil cutout of 200mm diameter (314square centimeters). It is connected to the channel 3 of the FDC2114EVM with a coax cable in single-ended configuration.
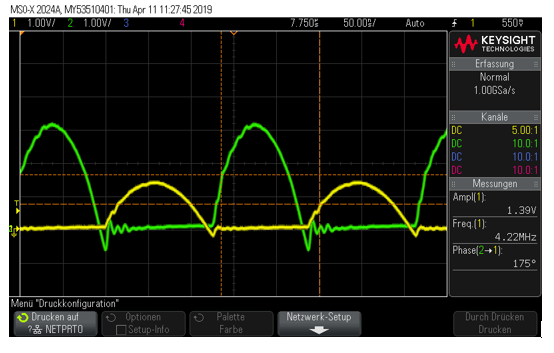
I could optimize sensitivity of my configuration by lowering the capacitance of the LC-tank to 4.7pF. But when I set the LC drive current (IDRIVE) to achieve 1.2V to 1.8V oscillation amplitude the sensitivity is goes down . Otherwise, when I reduce the LC drive current to 60uA and lower I can detect a much higher signal. How can that be? Are there some configurations I missed?
Thank you.
E.P.