Hi,
I'm trying to parse the OOB Demo .dat file and I'm having this problem where all my coordinates (x, y and z) values are zeros and that's because of the huge value of xyzQFormat, I tried recording the .dat multiple times and used different PCs but it's always the same value 48547. Same thing with the # Detected Objects value (in the descriptor section) which always gives a value of 17247. As you can see in the photo below, I'm highlighting the # Detected Object and xyzQFormat.

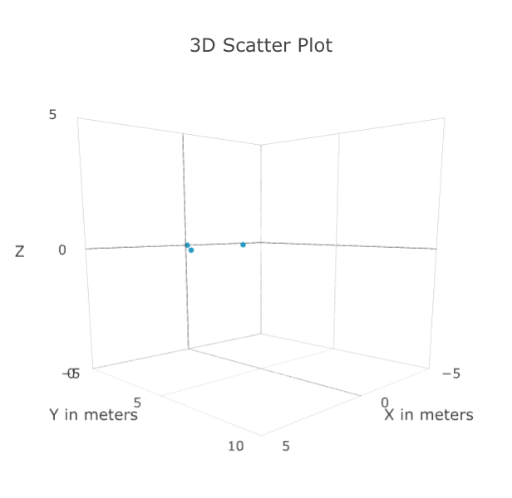
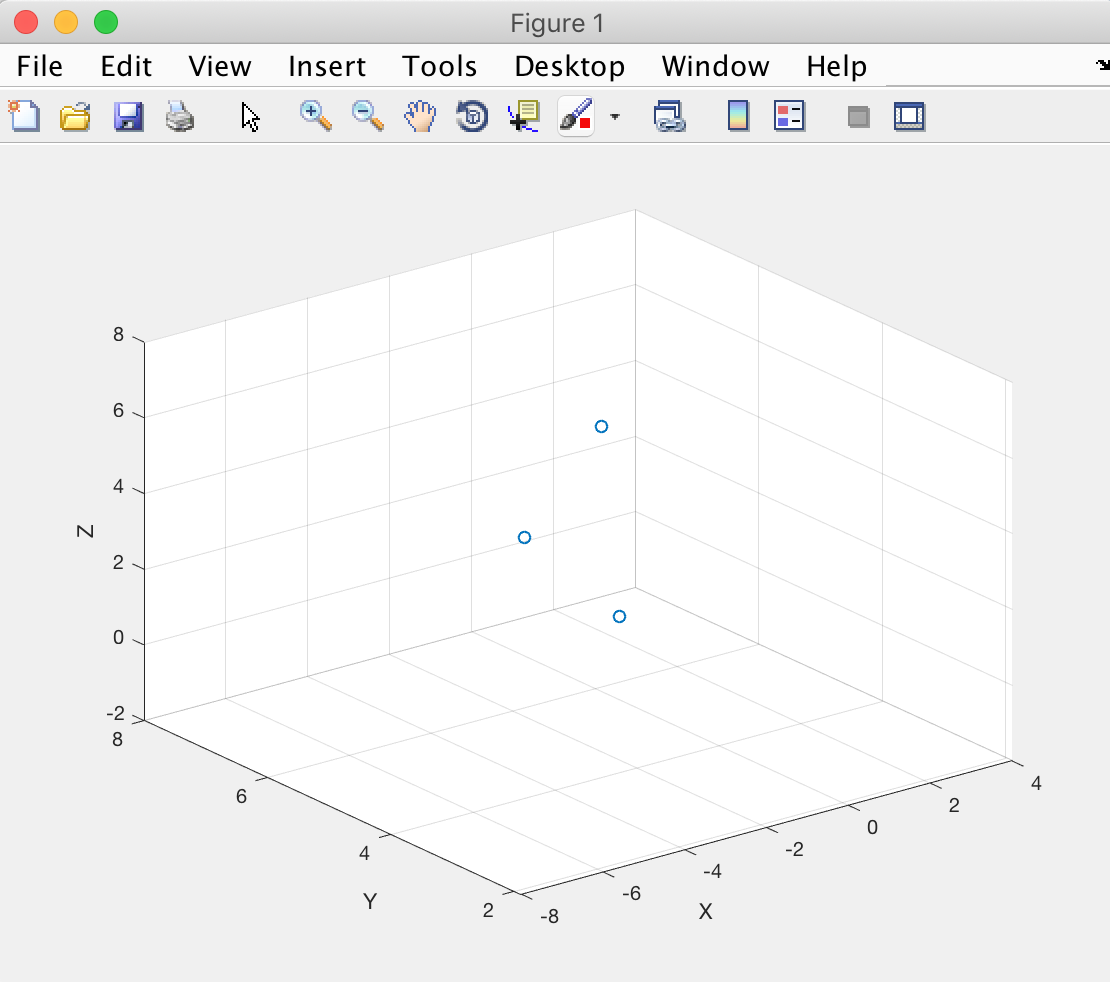
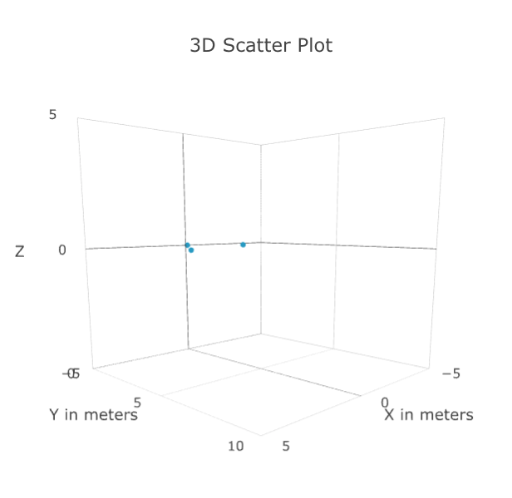
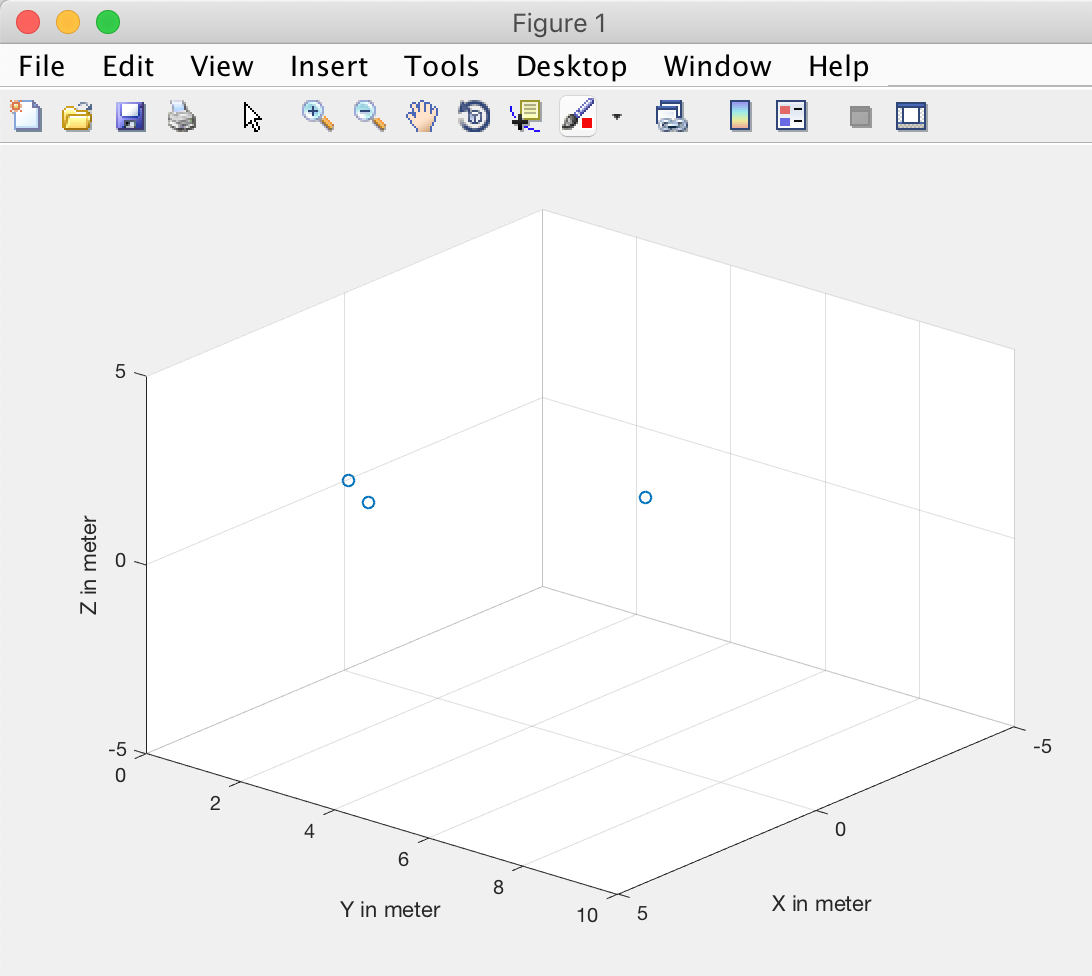
My understand is that the equation to calculate a coordinate in meter would be; x in meter = x / (2 ^xyzQFormat), please correct me if I'm wrong. If this equation is correct then it impossible to get a reasonable x value when xyzQFormat is this huge, right?
Please let me know if these two values make sense.
Thanks in Advance,
Yaser