Other Parts Discussed in Thread: IWR6843ISK
Hi,
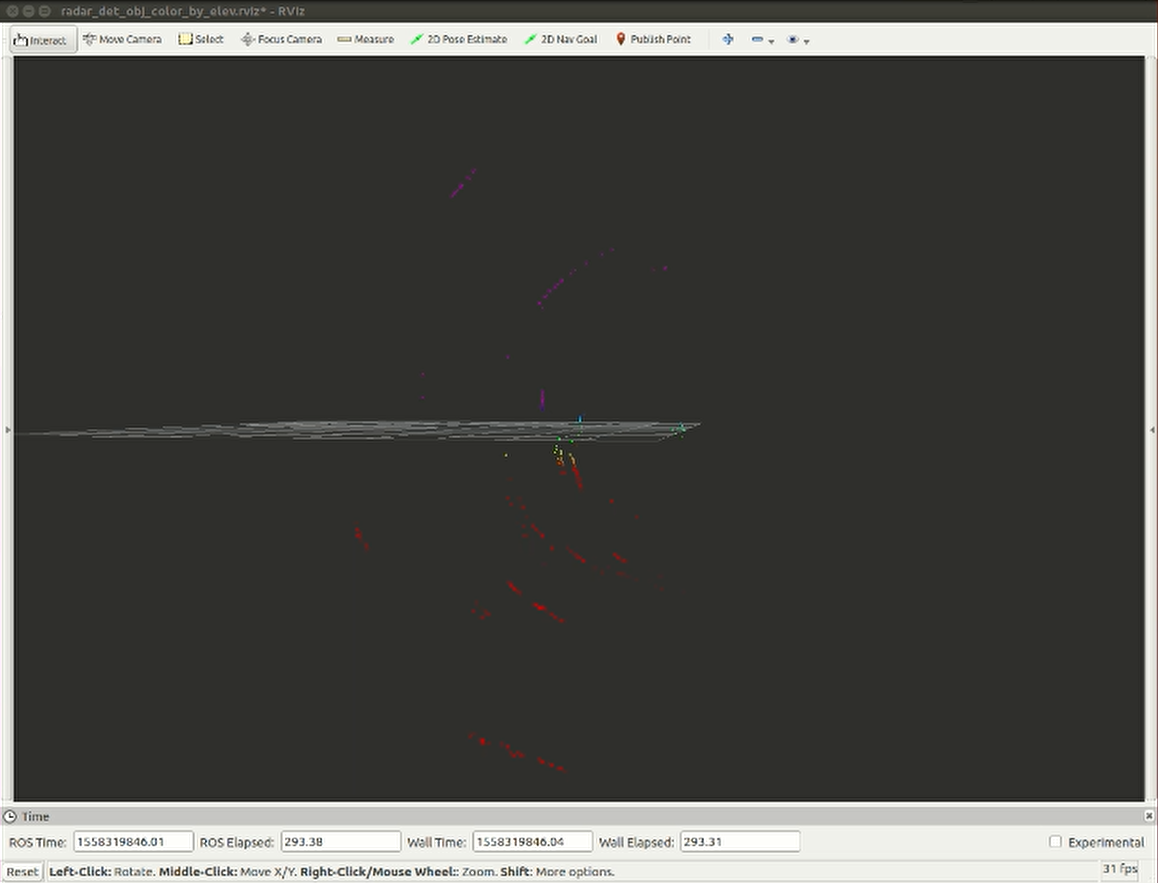
I have tried the ROS Point Cloud Visualizer.
"ti\mmwave_industrial_toolbox_3_3_0\labs\lab0006-ros-driver"
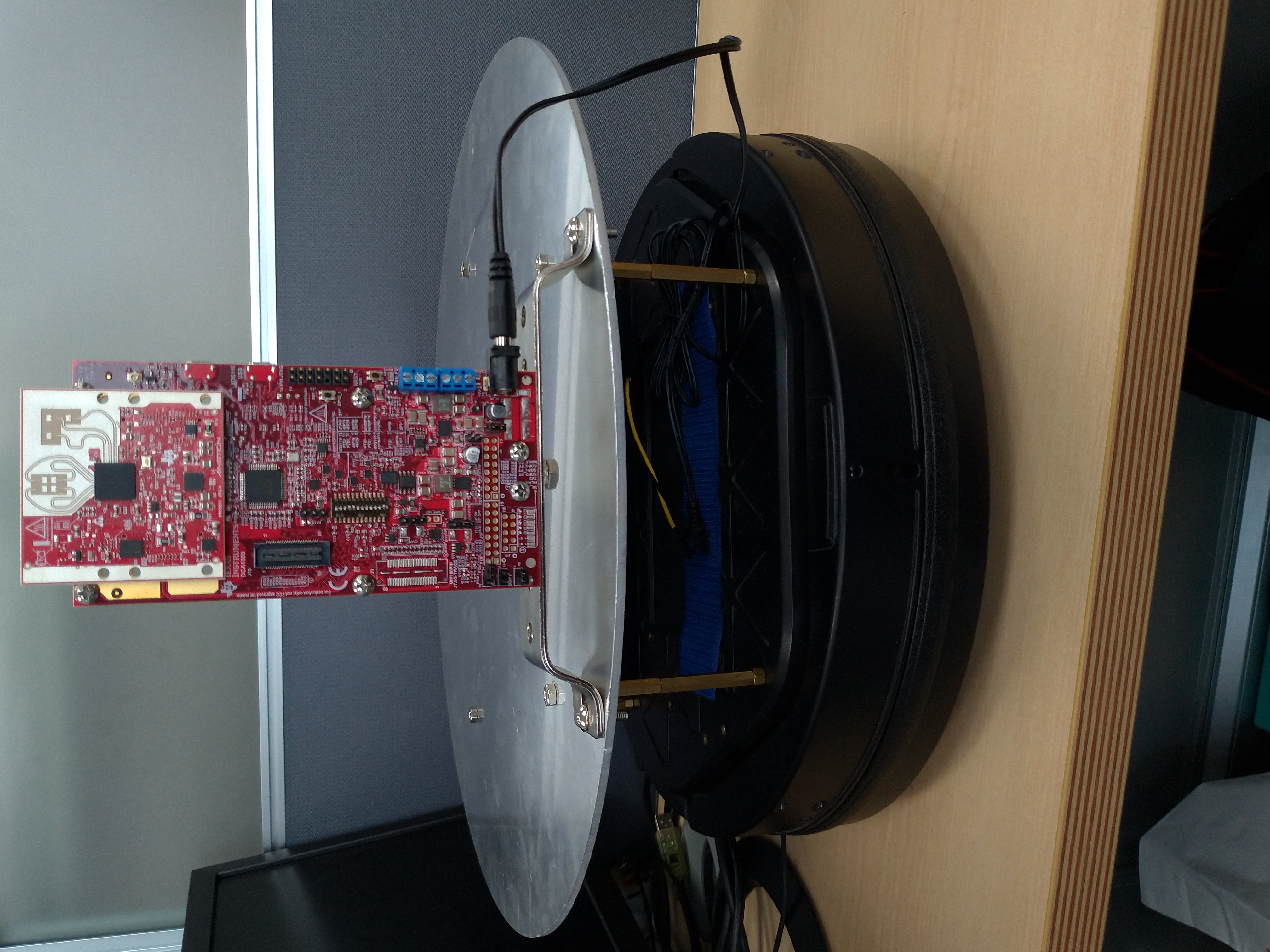
Instead of using IWR6843ISK, I use IWR6843ISK-ODS to run this lab because I need the wider FOV to fit the application context
I flash the 68xx demo pre-built binary into the EVM.
"ti\mmwave_sdk_03_01_01_02\packages\ti\demo\xwr68xx\mmw"
And I use the .cfg file in this ROS visualizer lab.
When I mount the sensor on a moving turtlebot and run this lab, I find the point cloud having some curve patterns. But where they are is actually empty space and the obstacle in front is not detected by the sensor. Also there is some points under the ground.

I wonder if the pre-built binary is only suitable for IWR6843ISK. Should I modify the .cfg file or the ROS code to fit the ODS?
Or all I can do now is just change the sensor to IWR6843ISK?
Regards,
Joseph