


Tool/software: TI-RTOS
Hi Sir,
I have some crash problem about CAN transmit.
I want to transmit two 8byte data which ID is "0xFFU" and "0xA1U" and I design the code as below.

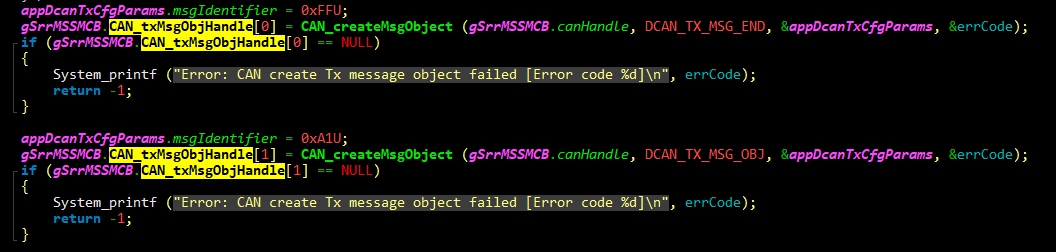

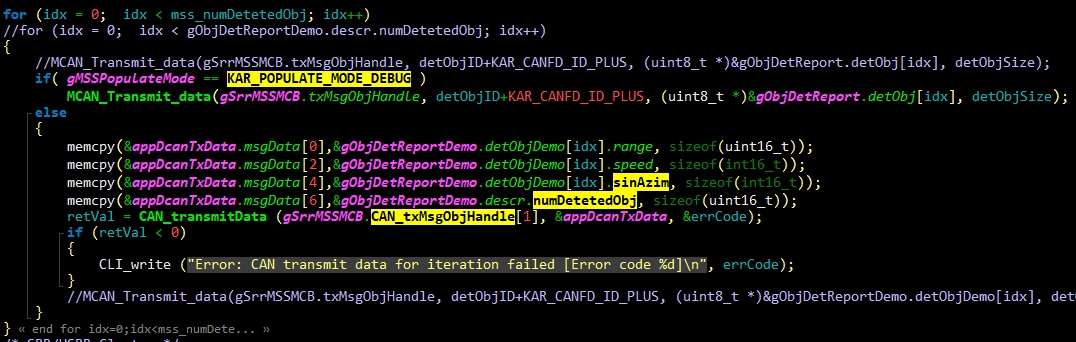
When I just transmit gSrrMSSMCB.CAN_txMsgObjHandle[0] it works ,but if I also transmit gSrrMSSMCB.CAN_txMsgObjHandle[1] it will crash .
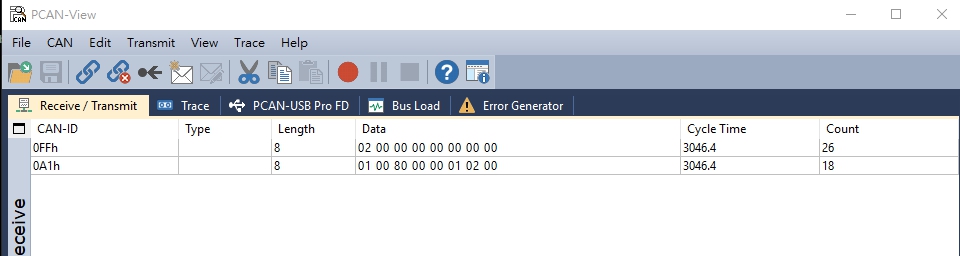
I analysis package on the PCAN-View the cycle time is very huge (without transmit "gSrrMSSMCB.CAN_txMsgObjHandle[1]" ,the cycle time is about 60ms ,but "gSrrMSSMCB.CAN_txMsgObjHandle[1]" is just a 8byte package too)
please help to solve this problem A.S.A.P please.
BR
Thanks
Frank
