Hi,
I tested pplcount demo with the cfg attached which was low CFAR thresholds.
The version of the tool box is 3.4.0.
It could be started, but it was stopped when many points/objects appeared.
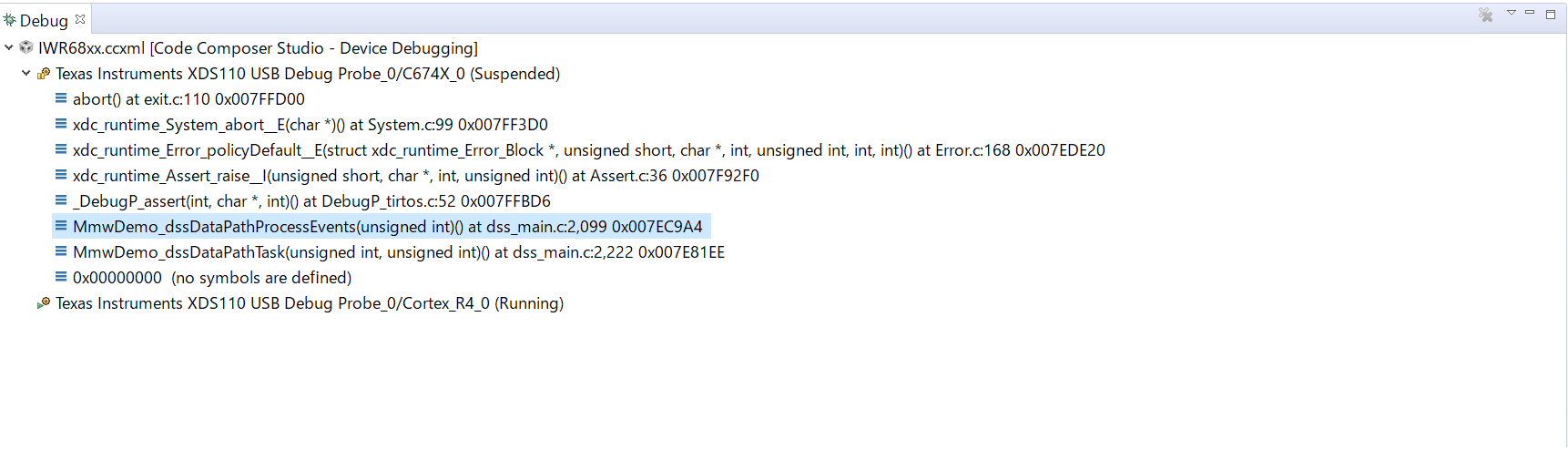
I tried to find the reason with CCS, but I could not find it.
The console text and capture of the Debug window are also attached.
Q1. What is the reason of sensor stop ? I will send other information if you need for analysis.
Q2. Can the issue solved with software ? Or is it needed larger memory or higher CPU ?
Note: The intention of the configuration change are following.
- bandwidth shall be < 0.5 GHz in our environment.
- would like to detect people almost static (ex. sitting on chair).
- would like to output many points for detect almost static people.
Best regards,
Fountain
3806.mmw_pplcount_demo_default.cfg
[C674X_0] Debug: MMWDemoDSS Data Path stop succeeded stop1,frames:4859
[Cortex_R4_0] CFAR Config sent successfully
CFAR Config sent successfully
Debug: System Heap (TCM): Size: 98304, Used = 55736, Free = 42568 bytes
Debug: System Heap (TCM): Size: 98304, Used = 55736, Free = 42568 bytes
Debug: (GtrackModuleInstance *)0x8009d30
Debug: System Heap (TCM): Size: 98304, Used = 55736, Free = 42568 bytes
Debug: MMWDemoMSS Received CLI sensorStart Event
MMWDemoMSS config success!
Debug: System Heap (TCM): Size: 98304, Used = 55736, Free = 42568 bytes
Debug: MMWDemoMSS mmWave config succeeded
[C674X_0] Heap L1 : size 16384 (0x4000), free 4096 (0x1000)
Heap L2 : size 49152 (0xc000), free 34888 (0x8848)
Memory allocation successful
Heap L3 : size 786432 (0xc0000), free 370688 (0x5a800)
{module#8}: "../dss_main.c", line 2088: error {id:0x10000, args:[0x81a444, 0x81a444]}
xdc.runtime.Error.raise: terminating execution
[Cortex_R4_0] Error: Unsupported Mailbox message id=-18022141