Other Parts Discussed in Thread: AWR1642
Hello Sir,
I am using AWR1642 demo for my application, in that I am using NonOS demo code.
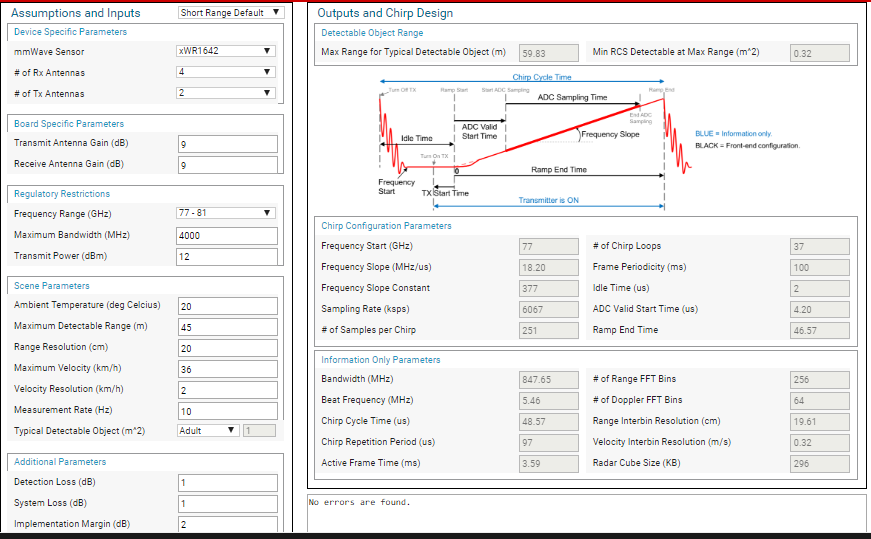
Currently I am able to detect objects within 10m Range only using present config settings from NonOs demo, but my application requires range upto 80m. for that I am using "'tidud93- 80 meter range object detection using AWR1642'' PDF, according to table number 2 chirp configuration given in this PDF for 80 meter range are-
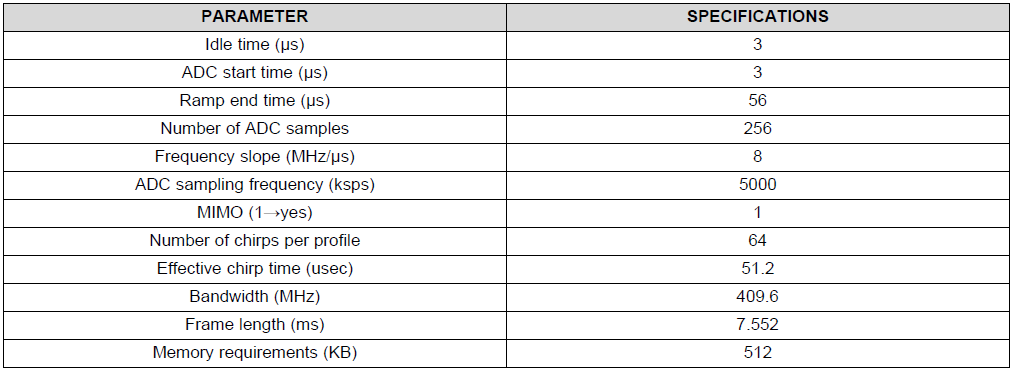
here i have set the parameters till ADC sampling frequency, how can I set the other parameters like MIMO, number of chirp per profile, effective chirp time, bandwidth, and memory requirement?
Is here number of chirp profile means number of chirp per frame?
What is effective chirp time?
how can i set bandwidth and frame length? which bandwidth is this?
Is i have to to use subframe here for 80 meter detection configuration in NONOS code?
please help me out to resolve this issue as early as possible.
Regards,
Sonal Chavhan.