


Other Parts Discussed in Thread: IWR6843
Hello !
I've performed some tests with my IWR6843 and some elements surprised me and I'd like to know what could cause those phenomena.
- The pointcloud "moves" a lot. I mean, it seems that, even with static object, the detection of the object is unreliable. Sometimes, some points will appear where there is no object or the pointcloud of a static object change a lot. Is this a characteristic of radar sensor, or is this issue coming from computing/algorithms.
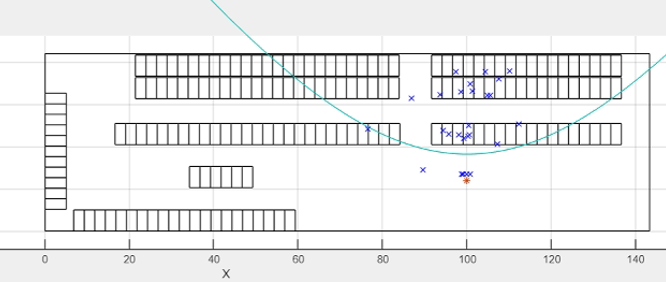
- In my use case, I must detect the occupancy of specific areas. But quite often the radar does not detect the objects, here is an illustration of one of my tests (reality vs pointcloud):
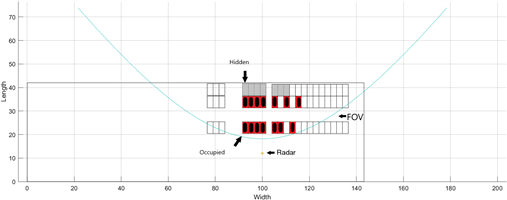

What can be the reasons of these non detected objects ? - Does the difference between the real area covered and the theoric FOV is due to the radiation curve of antennas or due to the low-level configuration (here is my configuration: 2D-profile40m.cfg)

Thanks in advance for your help,
Have a great day !
Quentin


