Hi,
I am now trying to measure the maximum detection distance of IWR6843ISK-ODS, and did some experiments as below.
[Experiment 1]
- Device
IWR6843ISK-ODS
- FW
"C:\ti\mmwave_industrial_toolbox_3_6_1__win\mmwave_industrial_toolbox_3_6_1\labs\lab0020_pplcount_Overhead\Pre-compiled Binary\ODS\ods_pplcount_lab_68xx.bin"
- configuration file
"C:\ti\mmwave_industrial_toolbox_3_6_1__win\mmwave_industrial_toolbox_3_6_1\labs\lab0020_pplcount_Overhead\GUI_A_base_no_logic\mmw_pplcount_demo_default.cfg"
- radar mount position
(see below)

- How I measured
I ran matlab app in SideMount mode and measured d1 where points(not target tracks) started to appear.
matlab app: "C:\ti\mmwave_industrial_toolbox_3_6_1__win\mmwave_industrial_toolbox_3_6_1\labs\lab0020_pplcount_Overhead\GUI_A_base_no_logic\main_pplcount_viz.m"
- result
d1 = 3.5m
[Experiment 2]
- Device
Same as Experiment 1.
- FW
Same as Experiment 1.
- configuration file
Same as Experiment 1.
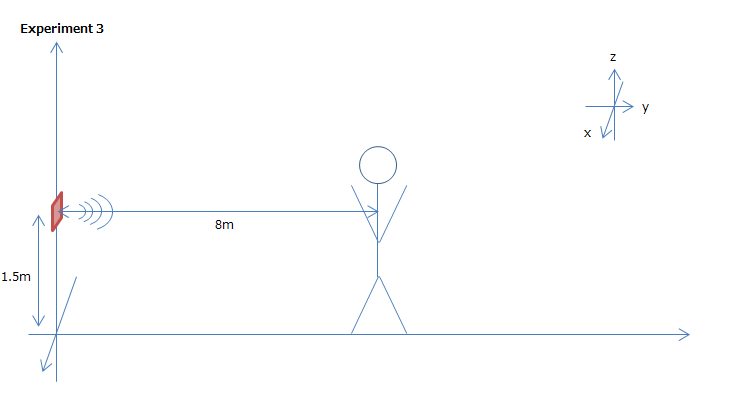
- radar mount position
(see below)

- How I measured
I ran the same matlab app in Overhead mode and measured d2 where points(not target tracks) started to appear.
- result
d2 = 5.5m -> (d3 would be calculated as 6~7m geometrically.)
[Question]
According to the Experiment 2 result, the detection distance of 6~7m is achieved even around the edge of FOV.
Therefore, I expected that the detection distance would be longer, say 8~9m, around 0 degree(y-direction) of FOV.
However, the Experiment 1 result doesn't satisfy this expectation.
Why is this so?
(Since it is regarded to mount the radar on ceiling at 3m high for people count demo, is there any software implementation that cuts off points beyond y = 3m maybe?)
Best regards,
Fields