Other Parts Discussed in Thread: MSP430F5529, ,
Hi Team,
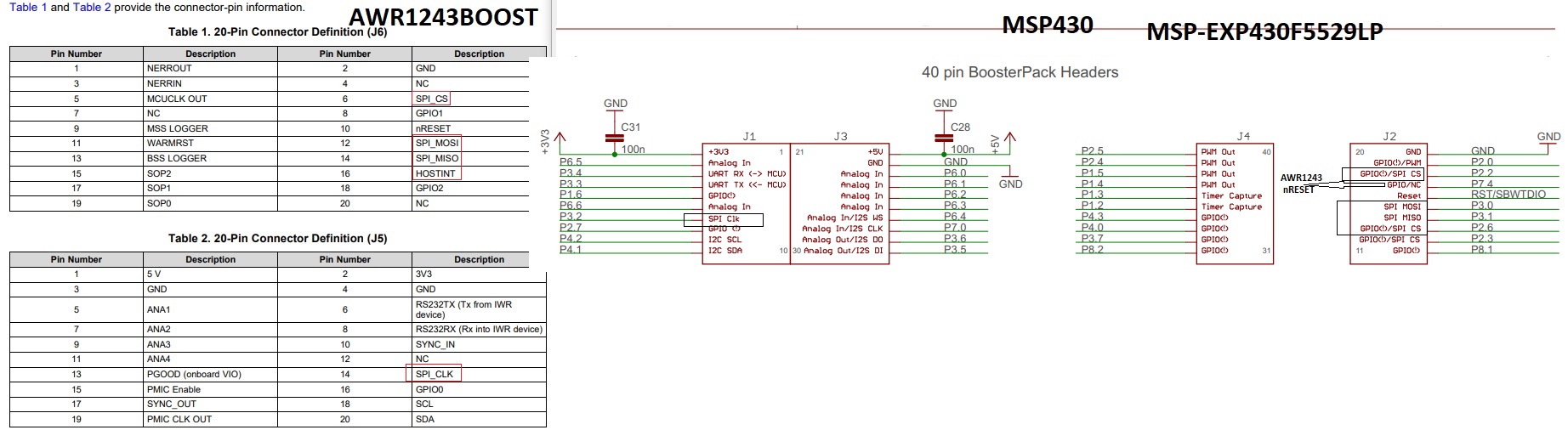
Customer has AWR1243BOOST + MSP430F5529. Both have LaunchPad. Customer wants to use the MSP430 to control the AWR1243 via the SPI interface. He also saw mmwavelink.example in DFP. Customer would like to know how to remove the routine to MSP430?
Thanks.