


Other Parts Discussed in Thread: BOOSTXL-PGA460, PGA460
Dear Members,
I have been using BOOSTXL-PGA460 EVM in bi-static mode for distance measurement. I am using audiowell transducers having center frequency of 58.6KHz. The transducer specifications are similar to Murata MA58MF14-7N transducer. My test setup is shown below:
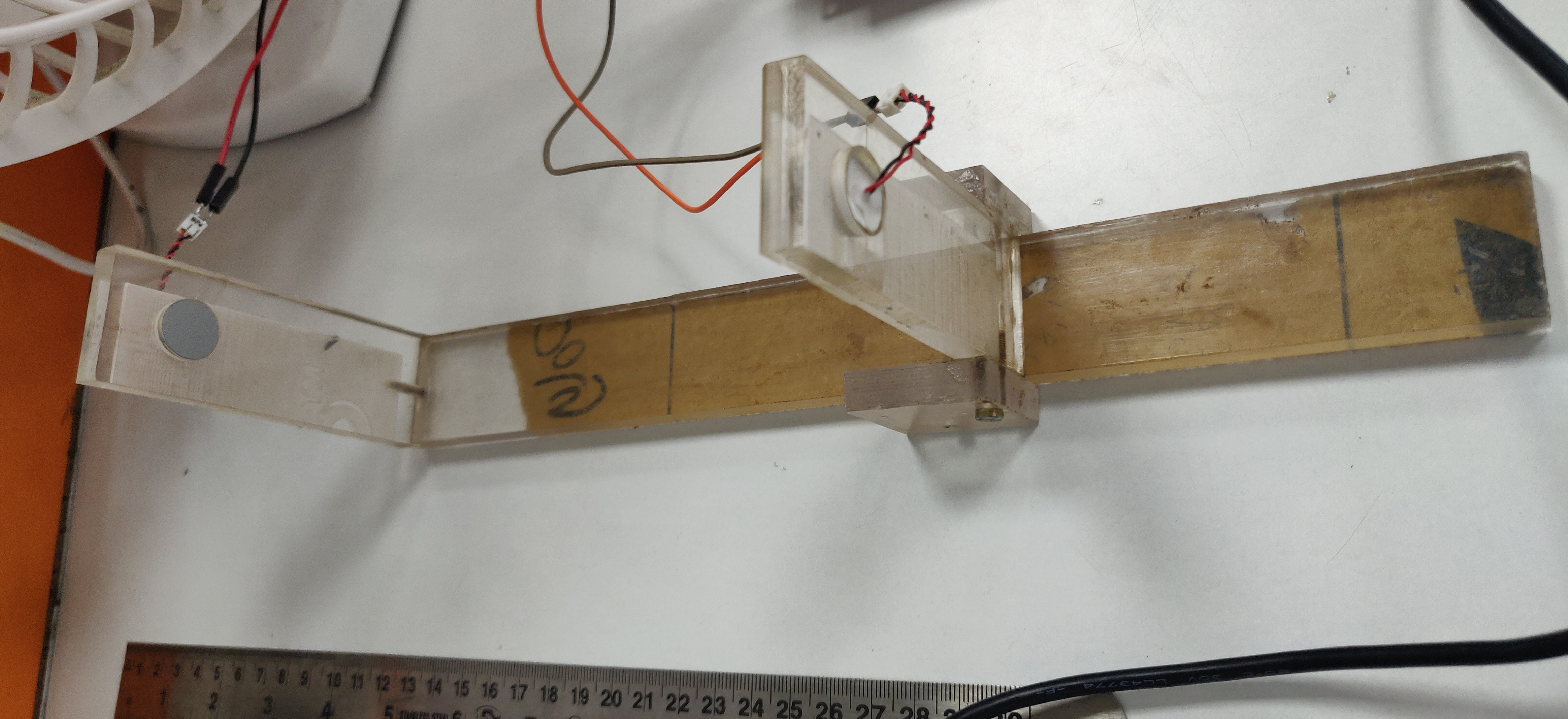
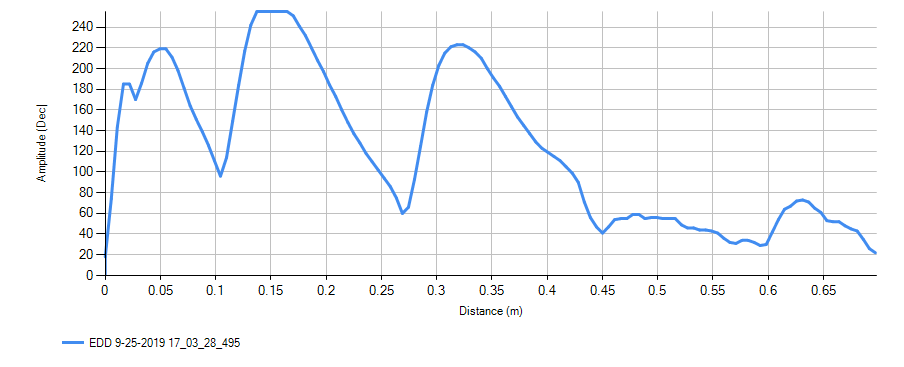
Distance between transducers has been kept at 166mm. But i am getting a reading of around 120mm on EDD in GUI. Please find attached below image of EDD:
Damping resistor used is 10k and a tuning capacitor of 680pF is used.
Register settings used are in the attached text file.
;GRID_USER_MEMSPACE 00 (USER_DATA1),00 01 (USER_DATA2),00 02 (USER_DATA3),00 03 (USER_DATA4),00 04 (USER_DATA5),00 05 (USER_DATA6),00 06 (USER_DATA7),00 07 (USER_DATA8),00 08 (USER_DATA9),00 09 (USER_DATA10),00 0A (USER_DATA11),00 0B (USER_DATA12),00 0C (USER_DATA13),00 0D (USER_DATA14),00 0E (USER_DATA15),00 0F (USER_DATA16),00 10 (USER_DATA17),00 11 (USER_DATA18),00 12 (USER_DATA19),00 13 (USER_DATA20),00 14 (TVGAIN0),44 15 (TVGAIN1),34 16 (TVGAIN2),44 17 (TVGAIN3),65 18 (TVGAIN4),B7 19 (TVGAIN5),ED 1A (TVGAIN6),C4 1B (INIT_GAIN),18 1C (FREQUENCY),8F 1D (DEADTIME),10 1E (PULSE_P1),05 1F (PULSE_P2),14 20 (CURR_LIM_P1),07 21 (CURR_LIM_P2),FF 22 (REC_LENGTH),07 23 (FREQ_DIAG),11 24 (SAT_FDIAG_TH),22 25 (FVOLT_DEC),69 26 (DECPL_TEMP),CF 27 (DSP_SCALE),00 28 (TEMP_TRIM),00 29 (P1_GAIN_CTRL),19 2A (P2_GAIN_CTRL),22 2B (EE_CRC),3B 40 (EE_CNTRL),00 41 (BPF_A2_MSB),89 42 (BPF_A2_LSB),52 43 (BPF_A3_MSB),FC 44 (BPF_A3_LSB),CE 45 (BPF_B1_MSB),01 46 (BPF_B1_LSB),99 47 (LPF_A2_MSB),7C 48 (LPF_A2_LSB),D3 49 (LPF_B1_MSB),01 4A (LPF_B1_LSB),97 4B (TEST_MUX),20 4C (DEV_STAT0),80 4D (DEV_STAT1),00 5F (P1_THR_0),44 60 (P1_THR_1),44 61 (P1_THR_2),44 62 (P1_THR_3),44 63 (P1_THR_4),55 64 (P1_THR_5),55 65 (P1_THR_6),84 66 (P1_THR_7),20 67 (P1_THR_8),72 68 (P1_THR_9),94 69 (P1_THR_10),63 6A (P1_THR_11),28 6B (P1_THR_12),30 6C (P1_THR_13),34 6D (P1_THR_14),3C 6E (P1_THR_15),00 6F (P2_THR_0),44 70 (P2_THR_1),44 71 (P2_THR_2),44 72 (P2_THR_3),44 73 (P2_THR_4),55 74 (P2_THR_5),55 75 (P2_THR_6),9C 76 (P2_THR_7),D0 77 (P2_THR_8),72 78 (P2_THR_9),10 79 (P2_THR_10),63 7A (P2_THR_11),28 7B (P2_THR_12),30 7C (P2_THR_13),34 7D (P2_THR_14),3C 7E (P2_THR_15),00 7F (THR_CRC),F5 EOF
I am not able to figure out why UMR shows 120mm even when the actual distance between transducers is 166mm. When I change the distance between the transducers, the UMR changes correspondingly but it doesn't matches the actual distance between transducers. It would be of great help if someone could point out what I am doing wrong.
Thanks
Nishant Sharma


