Hello.
I’m trying to plot the 3D scatter of moving object using data captured using IWR6843ODS+ DCA1000 just like
and I have some question.
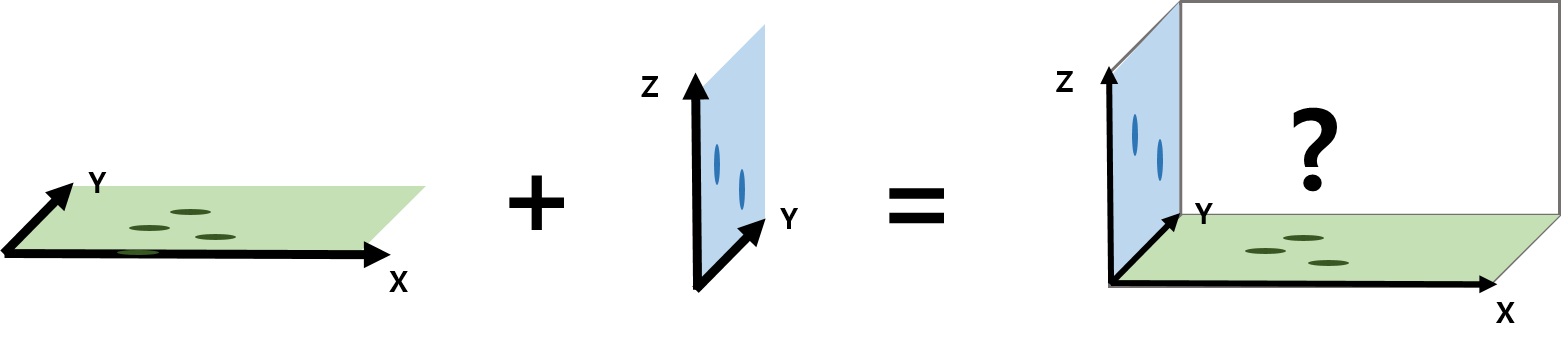
How does the 3D position of the scatter were found from 2D projections of objects?
From what I understand, the range-azimuth heat map will give XY-plane point cloud and the range-elevation heat map will give YZ-plane point cloud.
In many cases, the number of points detected in these two planes will be different
and matching YZ-plane point cloud and XY-plane point cloud only using Y position seems to be difficult.
I don’t know how to get XYZ point cloud from two 2D point clouds.