We want to construct 2D map using point cloud from IWR6843 sdk demo, yet we can't get enough points.
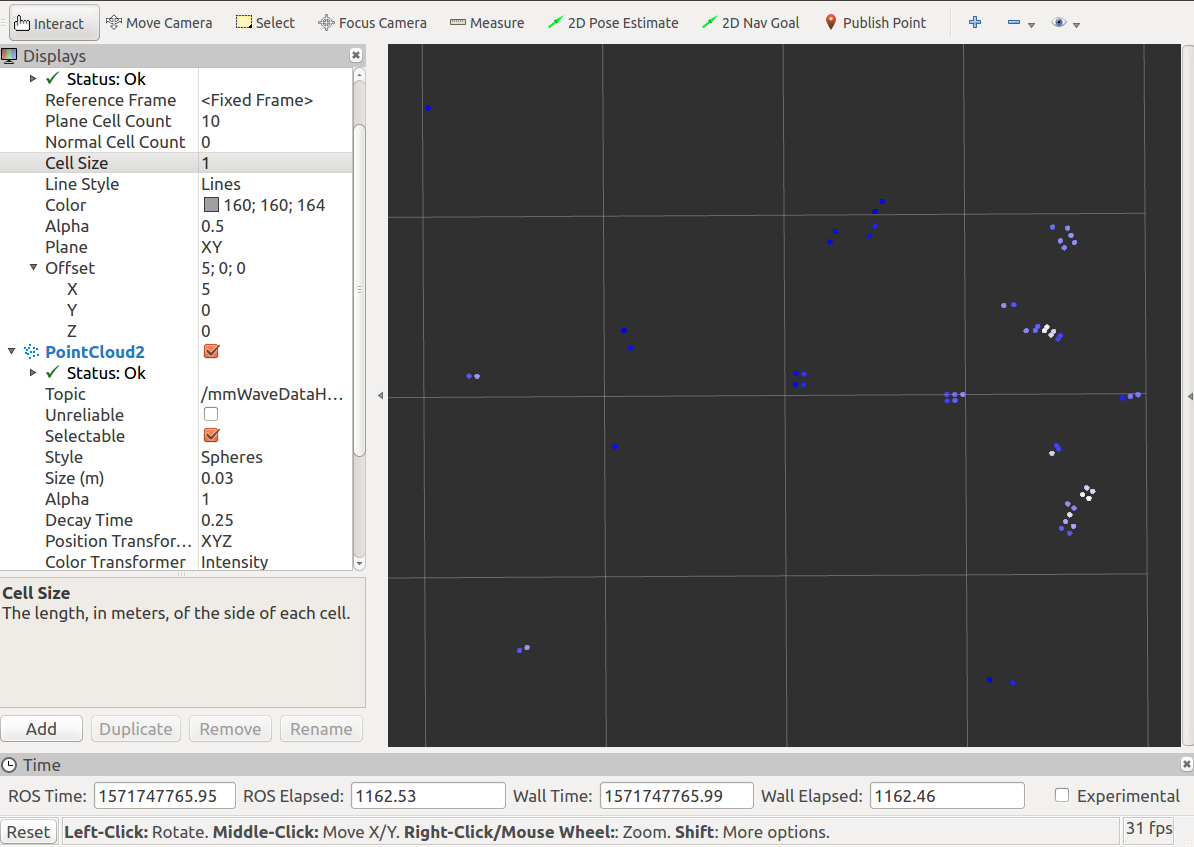
We have tried to turn off the Clutter-Removal feature and adjust cfarCfg, and get point cloud like the follow graph(We put the radar board towards a wall in a distance of about half meter):
How can we get more points for 2D map building? Can we adjust some config to get more static points from a wall and rebuild the map? Is IWR6843 able to capture as much information as we need?