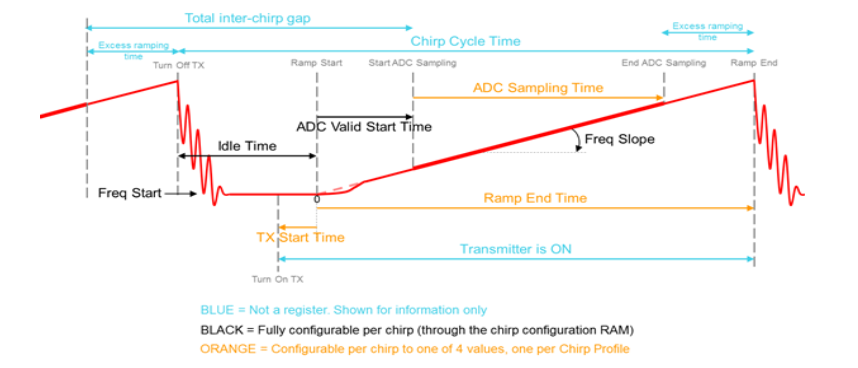
In related post, it encourages a positive tx Start Time in order to:
"Tx start time +ve: it gives the advantage to avoid undershoot or overshoot of frequency during ramp."
We (electronics engineers) can not understand what would cause this under/overshoot.
Can you explain what causes it?
We try to understand in order to decide on what value we should set for the Tx Start Time.