i have done a mapping using mmwave sensor for my TurtleBot2 robot.
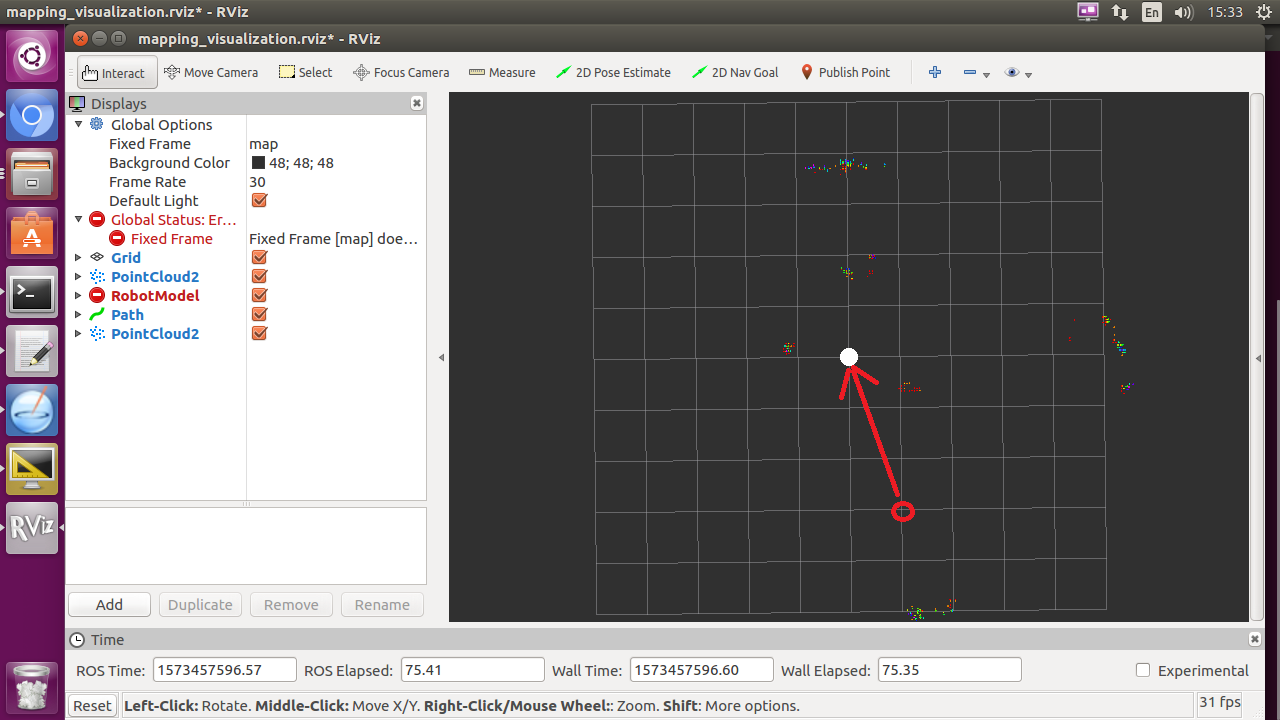
but when i do autonavigation, robot is not moving after give 2d nav goal. pls help.
screenshot attached for the reference
Log as below
--------------------------------------------------
cloud@cloud-Latitude-5400:~$ roslaunch turtlebot_mmwave_launchers radar_navigation.launch
... logging to /home/cloud/.ros/log/d59dd780-02d7-11ea-a12a-c0b5d7b3b701/roslaunch-cloud-Latitude-5400-3298.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://10.11.97.192:37905/
SUMMARY
========
PARAMETERS
* /fake_localization/use_map_topic: True
* /i_filt/filter_field_name: intensity
* /i_filt/filter_limit_max: 100
* /i_filt/filter_limit_min: 8
* /i_filt/filter_limit_negative: False
* /move_base/DWAPlannerROS/acc_lim_theta: 2.0
* /move_base/DWAPlannerROS/acc_lim_x: 2.0
* /move_base/DWAPlannerROS/acc_lim_y: 0.0
* /move_base/DWAPlannerROS/forward_point_distance: 0.12
* /move_base/DWAPlannerROS/global_frame_id: odom
* /move_base/DWAPlannerROS/goal_distance_bias: 0.01
* /move_base/DWAPlannerROS/holonomic_robot: False
* /move_base/DWAPlannerROS/latch_xy_goal_tolerance: True
* /move_base/DWAPlannerROS/max_rot_vel: 2.0
* /move_base/DWAPlannerROS/max_scaling_factor: 0.2
* /move_base/DWAPlannerROS/max_trans_vel: 0.5
* /move_base/DWAPlannerROS/max_vel_x: 0.2
* /move_base/DWAPlannerROS/max_vel_y: 0.0
* /move_base/DWAPlannerROS/min_rot_vel: 0.4
* /move_base/DWAPlannerROS/min_trans_vel: 0.1
* /move_base/DWAPlannerROS/min_vel_x: 0.0
* /move_base/DWAPlannerROS/min_vel_y: 0.0
* /move_base/DWAPlannerROS/occdist_scale: 0.01
* /move_base/DWAPlannerROS/oscillation_reset_angle: 0.0
* /move_base/DWAPlannerROS/oscillation_reset_dist: 0.0
* /move_base/DWAPlannerROS/path_distance_bias: 32.0
* /move_base/DWAPlannerROS/publish_cost_grid_pc: True
* /move_base/DWAPlannerROS/publish_traj_pc: True
* /move_base/DWAPlannerROS/rot_stopped_vel: 0.4
* /move_base/DWAPlannerROS/scaling_speed: 0.25
* /move_base/DWAPlannerROS/sim_time: 1.7
* /move_base/DWAPlannerROS/stop_time_buffer: 0.2
* /move_base/DWAPlannerROS/trans_stopped_vel: 0.05
* /move_base/DWAPlannerROS/vtheta_samples: 20
* /move_base/DWAPlannerROS/vx_samples: 3
* /move_base/DWAPlannerROS/vy_samples: 0
* /move_base/DWAPlannerROS/xy_goal_tolerance: 0.17
* /move_base/DWAPlannerROS/yaw_goal_tolerance: 0.4
* /move_base/GlobalPlanner/allow_unknown: True
* /move_base/GlobalPlanner/cost_factor: 3.0
* /move_base/GlobalPlanner/default_tolerance: 0.0
* /move_base/GlobalPlanner/lethal_cost: 253
* /move_base/GlobalPlanner/neutral_cost: 66
* /move_base/GlobalPlanner/old_navfn_behavior: False
* /move_base/GlobalPlanner/planner_costmap_publish_frequency: 0.0
* /move_base/GlobalPlanner/planner_window_x: 0.0
* /move_base/GlobalPlanner/planner_window_y: 0.0
* /move_base/GlobalPlanner/publish_potential: True
* /move_base/GlobalPlanner/publish_scale: 100
* /move_base/GlobalPlanner/use_dijkstra: True
* /move_base/GlobalPlanner/use_grid_path: False
* /move_base/GlobalPlanner/use_quadratic: True
* /move_base/NavfnROS/allow_unknown: False
* /move_base/NavfnROS/default_tolerance: 0.0
* /move_base/NavfnROS/planner_window_x: 0.0
* /move_base/NavfnROS/planner_window_y: 0.0
* /move_base/NavfnROS/visualize_potential: False
* /move_base/aggressive_reset/layer_names: ['obstacle_layer']
* /move_base/base_global_planner: navfn/NavfnROS
* /move_base/base_local_planner: dwa_local_planner...
* /move_base/conservative_reset/layer_names: ['obstacle_layer']
* /move_base/controller_frequency: 5.0
* /move_base/controller_patience: 3.0
* /move_base/global_costmap/global_frame: map
* /move_base/global_costmap/height: 10.0
* /move_base/global_costmap/inflation_layer/cost_scaling_factor: 9.8
* /move_base/global_costmap/inflation_layer/enabled: True
* /move_base/global_costmap/inflation_layer/inflation_radius: 0.37
* /move_base/global_costmap/map_type: voxel
* /move_base/global_costmap/max_obstacle_height: 1
* /move_base/global_costmap/obstacle_layer/bump/clearing: False
* /move_base/global_costmap/obstacle_layer/bump/data_type: PointCloud2
* /move_base/global_costmap/obstacle_layer/bump/marking: True
* /move_base/global_costmap/obstacle_layer/bump/max_obstacle_height: 0.15
* /move_base/global_costmap/obstacle_layer/bump/min_obstacle_height: 0.0
* /move_base/global_costmap/obstacle_layer/bump/topic: mobile_base/senso...
* /move_base/global_costmap/obstacle_layer/combination_method: 1
* /move_base/global_costmap/obstacle_layer/enabled: True
* /move_base/global_costmap/obstacle_layer/mark_threshold: 2
* /move_base/global_costmap/obstacle_layer/max_obstacle_height: 1
* /move_base/global_costmap/obstacle_layer/observation_sources: scan bump
* /move_base/global_costmap/obstacle_layer/obstacle_range: 1.0
* /move_base/global_costmap/obstacle_layer/origin_z: 0.0
* /move_base/global_costmap/obstacle_layer/publish_voxel_map: True
* /move_base/global_costmap/obstacle_layer/raytrace_range: 3.0
* /move_base/global_costmap/obstacle_layer/scan/clearing: False
* /move_base/global_costmap/obstacle_layer/scan/data_type: PointCloud2
* /move_base/global_costmap/obstacle_layer/scan/marking: True
* /move_base/global_costmap/obstacle_layer/scan/max_obstacle_height: 1
* /move_base/global_costmap/obstacle_layer/scan/min_obstacle_height: 0.0
* /move_base/global_costmap/obstacle_layer/scan/topic: xyzi_filt_out
* /move_base/global_costmap/obstacle_layer/track_unknown_space: True
* /move_base/global_costmap/obstacle_layer/unknown_threshold: 15
* /move_base/global_costmap/obstacle_layer/z_resolution: 0.015
* /move_base/global_costmap/obstacle_layer/z_voxels: 16
* /move_base/global_costmap/plugins: [{'type': 'costma...
* /move_base/global_costmap/publish_frequency: 5
* /move_base/global_costmap/resolution: 0.02
* /move_base/global_costmap/robot_base_frame: base_footprint
* /move_base/global_costmap/robot_radius: 0.18
* /move_base/global_costmap/rolling_window: True
* /move_base/global_costmap/static_layer/enabled: True
* /move_base/global_costmap/static_map: False
* /move_base/global_costmap/transform_tolerance: 10
* /move_base/global_costmap/update_frequency: 15
* /move_base/global_costmap/width: 10.0
* /move_base/local_costmap/global_frame: odom
* /move_base/local_costmap/height: 4.0
* /move_base/local_costmap/inflation_layer/cost_scaling_factor: 8.0
* /move_base/local_costmap/inflation_layer/enabled: True
* /move_base/local_costmap/inflation_layer/inflation_radius: 0.22
* /move_base/local_costmap/map_type: voxel
* /move_base/local_costmap/max_obstacle_height: 1
* /move_base/local_costmap/obstacle_layer/bump/clearing: False
* /move_base/local_costmap/obstacle_layer/bump/data_type: PointCloud2
* /move_base/local_costmap/obstacle_layer/bump/marking: True
* /move_base/local_costmap/obstacle_layer/bump/max_obstacle_height: 0.15
* /move_base/local_costmap/obstacle_layer/bump/min_obstacle_height: 0.0
* /move_base/local_costmap/obstacle_layer/bump/topic: mobile_base/senso...
* /move_base/local_costmap/obstacle_layer/combination_method: 1
* /move_base/local_costmap/obstacle_layer/enabled: True
* /move_base/local_costmap/obstacle_layer/mark_threshold: 2
* /move_base/local_costmap/obstacle_layer/max_obstacle_height: 1
* /move_base/local_costmap/obstacle_layer/observation_sources: scan bump
* /move_base/local_costmap/obstacle_layer/obstacle_range: 1.0
* /move_base/local_costmap/obstacle_layer/origin_z: 0.0
* /move_base/local_costmap/obstacle_layer/publish_voxel_map: True
* /move_base/local_costmap/obstacle_layer/raytrace_range: 3.0
* /move_base/local_costmap/obstacle_layer/scan/clearing: False
* /move_base/local_costmap/obstacle_layer/scan/data_type: PointCloud2
* /move_base/local_costmap/obstacle_layer/scan/marking: True
* /move_base/local_costmap/obstacle_layer/scan/max_obstacle_height: 1
* /move_base/local_costmap/obstacle_layer/scan/min_obstacle_height: 0.0
* /move_base/local_costmap/obstacle_layer/scan/topic: xyzi_filt_out
* /move_base/local_costmap/obstacle_layer/track_unknown_space: True
* /move_base/local_costmap/obstacle_layer/unknown_threshold: 15
* /move_base/local_costmap/obstacle_layer/z_resolution: 0.015
* /move_base/local_costmap/obstacle_layer/z_voxels: 16
* /move_base/local_costmap/plugins: [{'type': 'costma...
* /move_base/local_costmap/publish_frequency: 10
* /move_base/local_costmap/resolution: 0.02
* /move_base/local_costmap/robot_base_frame: base_footprint
* /move_base/local_costmap/robot_radius: 0.18
* /move_base/local_costmap/rolling_window: True
* /move_base/local_costmap/static_layer/enabled: True
* /move_base/local_costmap/static_map: False
* /move_base/local_costmap/transform_tolerance: 1
* /move_base/local_costmap/update_frequency: 20
* /move_base/local_costmap/width: 4.0
* /move_base/oscillation_distance: 0.2
* /move_base/oscillation_timeout: 0.0
* /move_base/planner_frequency: 1.0
* /move_base/planner_patience: 5.0
* /move_base/recovery_behavior_enabled: True
* /move_base/recovery_behaviors: [{'type': 'rotate...
* /move_base/shutdown_costmaps: False
* /navigation_velocity_smoother/accel_lim_v: 1.0
* /navigation_velocity_smoother/accel_lim_w: 2.0
* /navigation_velocity_smoother/decel_factor: 1.5
* /navigation_velocity_smoother/frequency: 20.0
* /navigation_velocity_smoother/robot_feedback: 2
* /navigation_velocity_smoother/speed_lim_v: 0.8
* /navigation_velocity_smoother/speed_lim_w: 5.4
* /rosdistro: kinetic
* /rosversion: 1.12.14
* /x_filt/filter_field_name: x
* /x_filt/filter_limit_max: 4
* /x_filt/filter_limit_min: 0.1
* /x_filt/filter_limit_negative: False
* /y_filt/filter_field_name: y
* /y_filt/filter_limit_max: 3
* /y_filt/filter_limit_min: -3
* /y_filt/filter_limit_negative: False
* /z_filt/filter_field_name: z
* /z_filt/filter_limit_max: 0.1
* /z_filt/filter_limit_min: -0.4
* /z_filt/filter_limit_negative: False
NODES
/
fake_localization (fake_localization/fake_localization)
i_filt (nodelet/nodelet)
kobuki_safety_controller (nodelet/nodelet)
move_base (move_base/move_base)
navigation_velocity_smoother (nodelet/nodelet)
octomap_server (octomap_server/octomap_server_node)
pcl_manager (nodelet/nodelet)
voxel_grid_2_point_cloud (costmap_2d/costmap_2d_cloud)
x_filt (nodelet/nodelet)
y_filt (nodelet/nodelet)
z_filt (nodelet/nodelet)
ROS_MASTER_URI=http://localhost:11311
process[pcl_manager-1]: started with pid [3315]
process[x_filt-2]: started with pid [3316]
process[y_filt-3]: started with pid [3317]
process[z_filt-4]: started with pid [3318]
[ INFO] [1573293678.421547401]: Loading nodelet /x_filt of type pcl/PassThrough to manager pcl_manager with the following remappings:
[ INFO] [1573293678.421621694]: /x_filt/input -> /mmWaveDataHdl/RScan
[ INFO] [1573293678.421640935]: /x_filt/output -> /x_filt_out
[ INFO] [1573293678.425135224]: waitForService: Service [/pcl_manager/load_nodelet] has not been advertised, waiting...
process[i_filt-5]: started with pid [3330]
[ INFO] [1573293678.428230912]: Loading nodelet /y_filt of type pcl/PassThrough to manager pcl_manager with the following remappings:
[ INFO] [1573293678.428309847]: /y_filt/input -> /x_filt_out
[ INFO] [1573293678.428328750]: /y_filt/output -> /xy_filt_out
[ INFO] [1573293678.430477707]: waitForService: Service [/pcl_manager/load_nodelet] has not been advertised, waiting...
process[octomap_server-6]: started with pid [3346]
[ INFO] [1573293678.435852683]: Loading nodelet /z_filt of type pcl/PassThrough to manager pcl_manager with the following remappings:
[ INFO] [1573293678.435908816]: /z_filt/input -> /xy_filt_out
[ INFO] [1573293678.435927026]: /z_filt/output -> /xyz_filt_out
[ INFO] [1573293678.439040116]: waitForService: Service [/pcl_manager/load_nodelet] has not been advertised, waiting...
[ INFO] [1573293678.441398884]: Loading nodelet /i_filt of type pcl/PassThrough to manager pcl_manager with the following remappings:
[ INFO] [1573293678.441474185]: /i_filt/input -> /xyz_filt_out
[ INFO] [1573293678.441507341]: /i_filt/output -> /xyzi_filt_out
process[fake_localization-7]: started with pid [3364]
[ INFO] [1573293678.443363048]: waitForService: Service [/pcl_manager/load_nodelet] has not been advertised, waiting...
process[navigation_velocity_smoother-8]: started with pid [3374]
process[kobuki_safety_controller-9]: started with pid [3377]
process[move_base-10]: started with pid [3400]
process[voxel_grid_2_point_cloud-11]: started with pid [3409]
[ INFO] [1573293678.480839642]: Initializing nodelet with 8 worker threads.
[ INFO] [1573293678.484772026]: waitForService: Service [/pcl_manager/load_nodelet] is now available.
[ INFO] [1573293678.488363093]: waitForService: Service [/pcl_manager/load_nodelet] is now available.
[ INFO] [1573293678.492922238]: waitForService: Service [/pcl_manager/load_nodelet] is now available.
[ INFO] [1573293678.499189878]: waitForService: Service [/pcl_manager/load_nodelet] is now available.
Warning: TF_OLD_DATA ignoring data from the past for frame base_link at time 1.57329e+09 according to authority unknown_publisher
Possible reasons are listed at wiki.ros.org/.../Errors explained
at line 277 in /tmp/binarydeb/ros-kinetic-tf2-0.5.20/src/buffer_core.cpp
Warning: TF_OLD_DATA ignoring data from the past for frame base_link at time 1.57329e+09 according to authority unknown_publisher
Possible reasons are listed at wiki.ros.org/.../Errors explained
at line 277 in /tmp/binarydeb/ros-kinetic-tf2-0.5.20/src/buffer_core.cpp
[ INFO] [1573293678.876806211]: Using plugin "static_layer"
[ INFO] [1573293678.903452960]: Requesting the map...
[ INFO] [1573293679.115512139]: Resizing static layer to 180 X 135 at 0.050000 m/pix
[ INFO] [1573293679.215410299]: Received a 180 X 135 map at 0.050000 m/pix
[ INFO] [1573293679.231011084]: Using plugin "obstacle_layer"
[ INFO] [1573293679.240631537]: Subscribed to Topics: scan bump
[ INFO] [1573293679.393936018]: Using plugin "inflation_layer"
[ INFO] [1573293679.470907625]: Using plugin "static_layer"
[ INFO] [1573293679.474795601]: Requesting the map...
[ INFO] [1573293679.477254075]: Resizing static layer to 180 X 135 at 0.050000 m/pix
[ INFO] [1573293679.577510527]: Received a 180 X 135 map at 0.050000 m/pix
[ INFO] [1573293679.592208927]: Using plugin "obstacle_layer"
[ INFO] [1573293679.601962543]: Subscribed to Topics: scan bump
[ INFO] [1573293679.694987542]: Using plugin "inflation_layer"
[ INFO] [1573293679.773467360]: Created local_planner dwa_local_planner/DWAPlannerROS
[ INFO] [1573293679.781723800]: Sim period is set to 0.20
[ INFO] [1573293680.024236377]: odom received!
[ WARN] [1573293722.883955515]: mmWave customized rotate recovery behavior started.
[ WARN] [1573293722.884169656]: Clearing costmaps...
[ WARN] [1573293722.929972133]: Performing rotation...
[ERROR] [1573293722.980195057]: Rotate recovery can't rotate in place because there is a potential collision. Cost: -1.00
[ WARN] [1573293722.980348859]: mmWave customized rotate recovery behavior started.
[ WARN] [1573293722.980364617]: Clearing costmaps...
[ WARN] [1573293723.007984914]: Performing rotation...
[ERROR] [1573293723.008141085]: Rotate recovery can't rotate in place because there is a potential collision. Cost: -1.00
[ WARN] [1573293728.284014011]: mmWave customized rotate recovery behavior started.
[ WARN] [1573293728.284053459]: Clearing costmaps...
[ WARN] [1573293728.387102682]: Performing rotation...
[ERROR] [1573293728.437354675]: Rotate recovery can't rotate in place because there is a potential collision. Cost: -1.00
[ERROR] [1573293733.684170303]: Aborting because a valid plan could not be found. Even after executing all recovery behaviors