Other Parts Discussed in Thread: TDC1000,
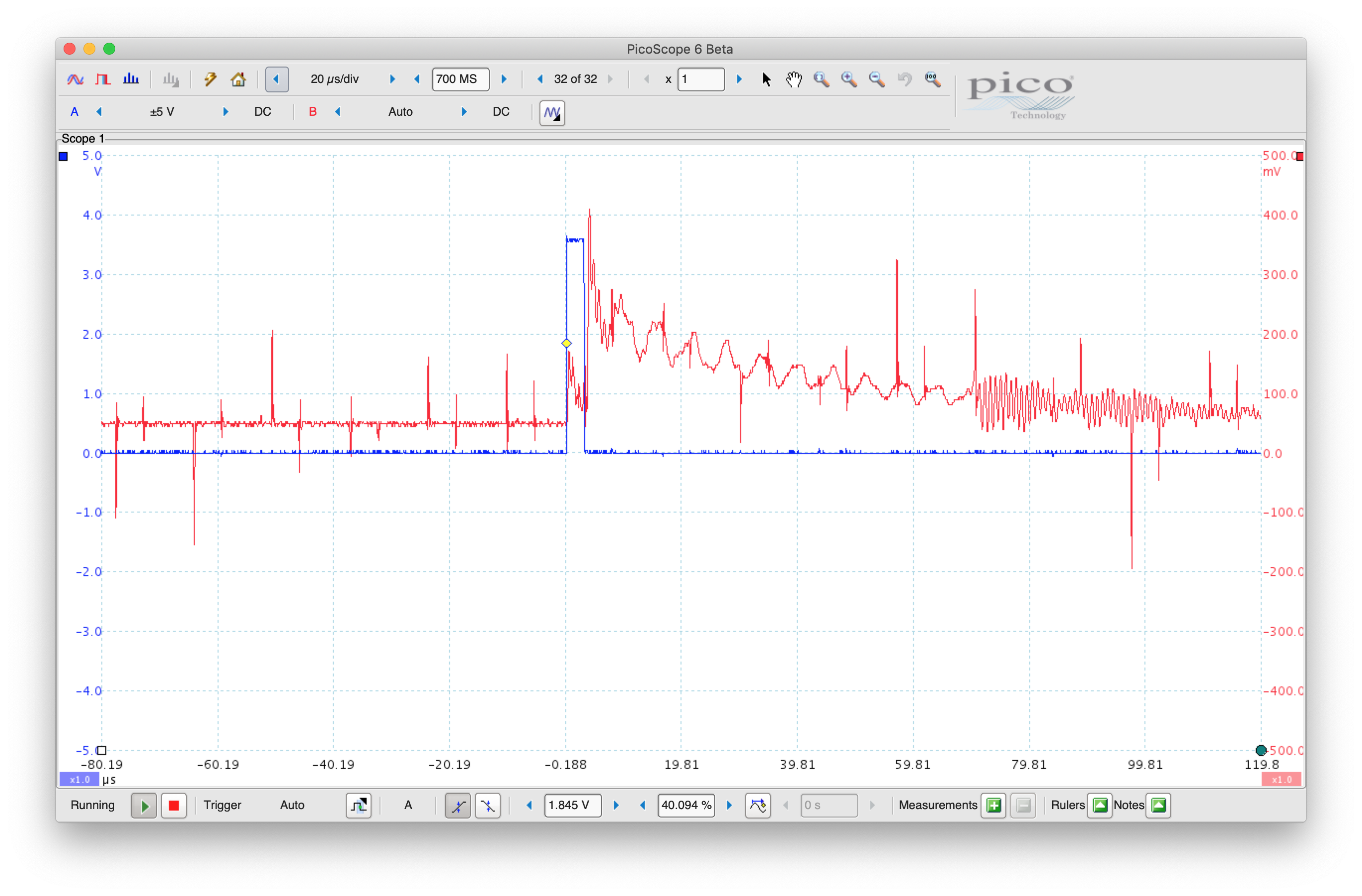
I am seeing generally noisy signals including a very pronounced ringing at ~160 kHz on the TX signal. These noise effects appear to be swamping out the actual acoustic signals and I have been unable to get the TDC1000 to correctly generate STOP pulses as expected. In general, my scope traces don't look nearly as clean as I have seen in the documentation or in most other people's posts on this forum. Any ideas what is going wrong here?
I am using the TDC1000-C2000EVM with two 1 MHZ Steminic transducers (SMD15T21R111WL). The two transducers are mounted with acoustic coupling gel to opposite sides of a plastic water-filled container ~100 mm apart. Sensor 1 is connected to TX1 and GND. Sensor 2 is sometimes connected to TX2 and GND, but at other times just connected directly to an oscilloscope probe. Oscilloscope probes are set to 10X. The TOF_MEAS_MODE is Mode0.
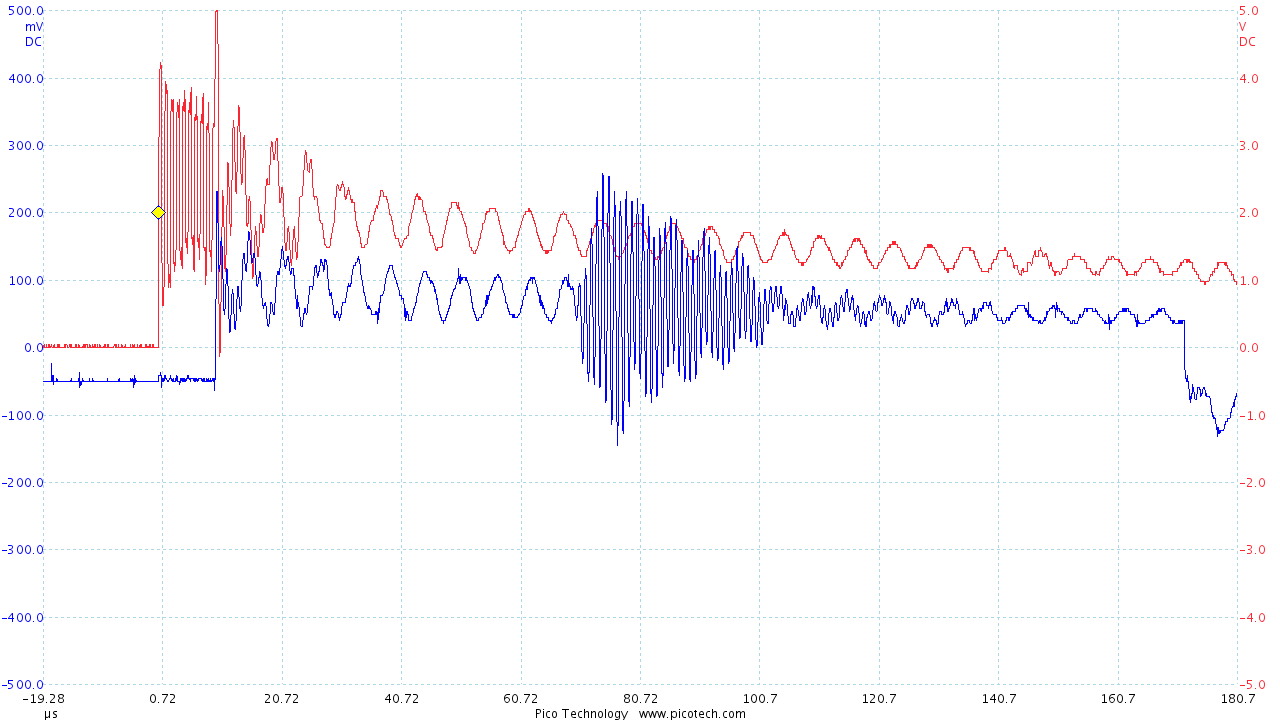
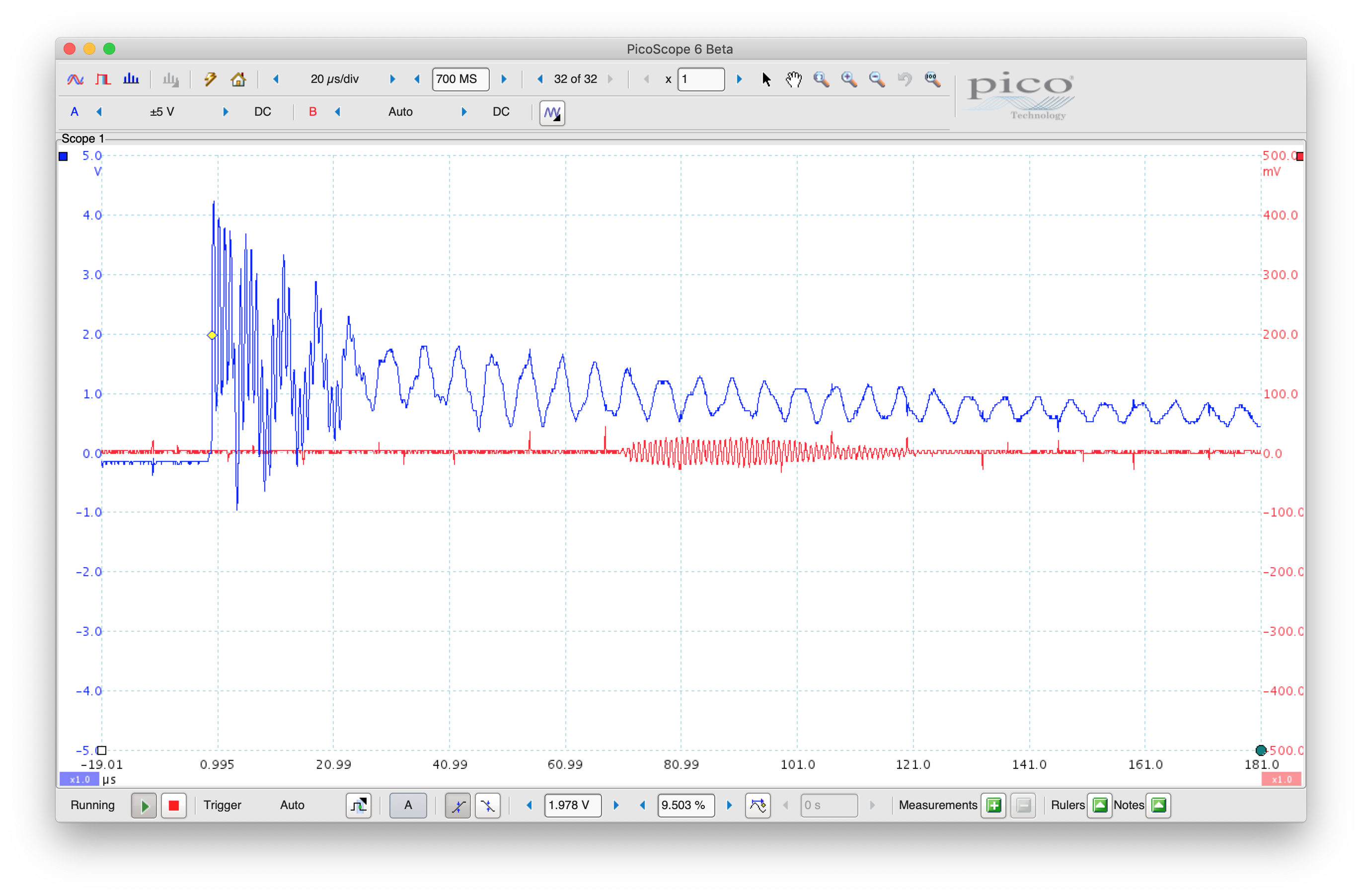
In the screenshot below, blue is the TX1 signal and red is the unconnected sensor 2 (just the oscilloscope) hearing the transmitted signal ~70 us later after propagation through 100 mm of water. The lower frequency ringing is approximately 160 kHz.
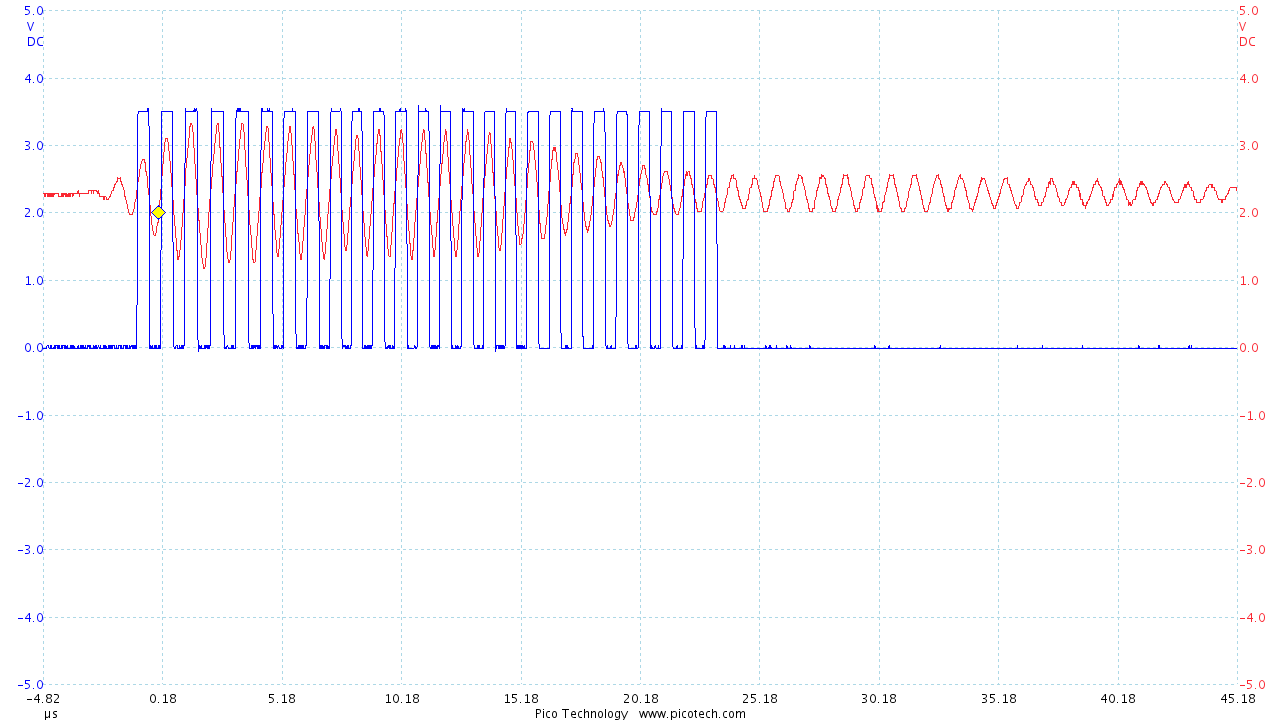
In the next scope trace (below), I have moved the blue channel to the COMPIN buffer. Note several things:
- COMPIN is picking up some of the excessive ringing from the TX signal.
- COMPIN goes completely quite after ~20 us
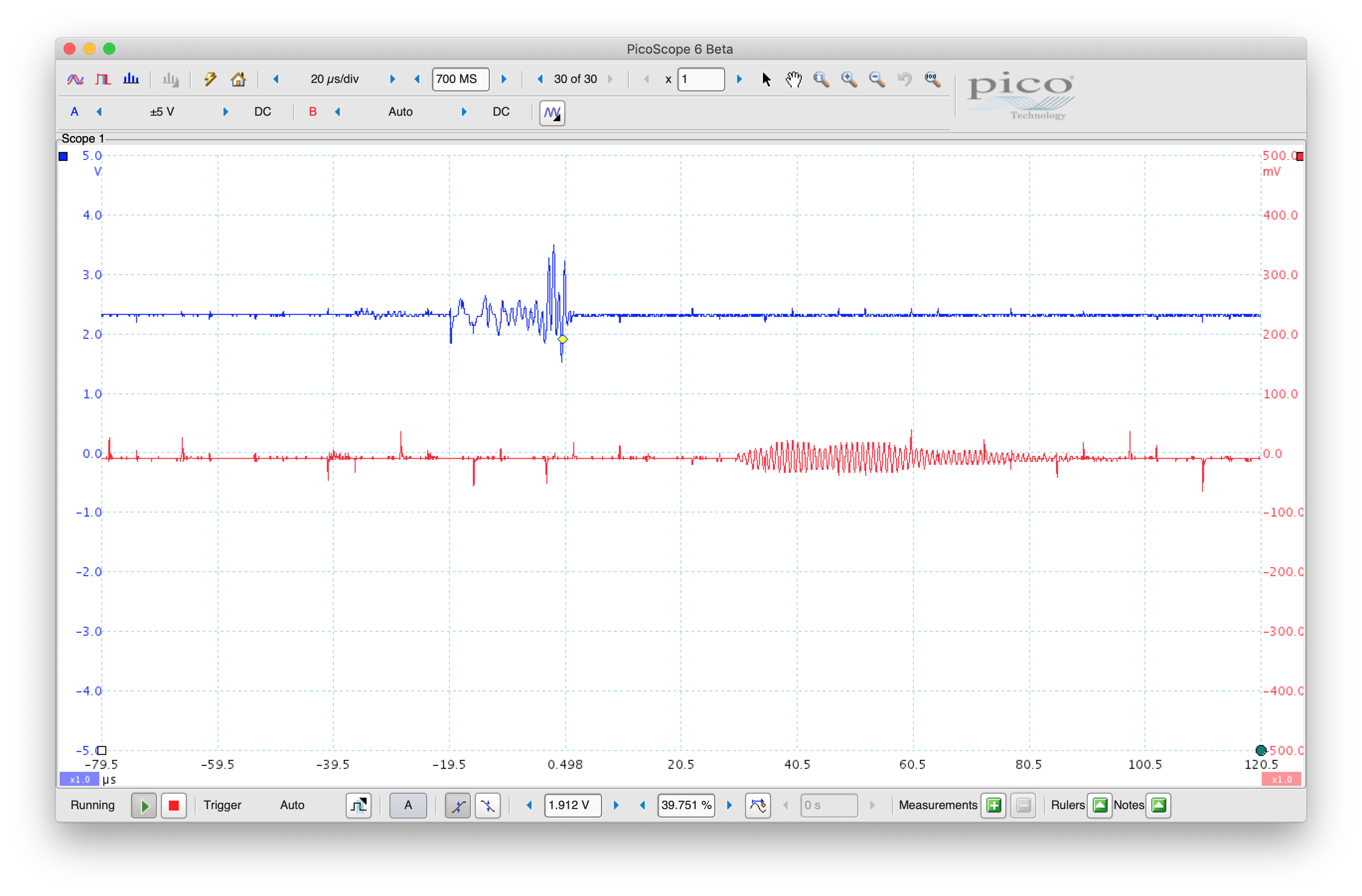
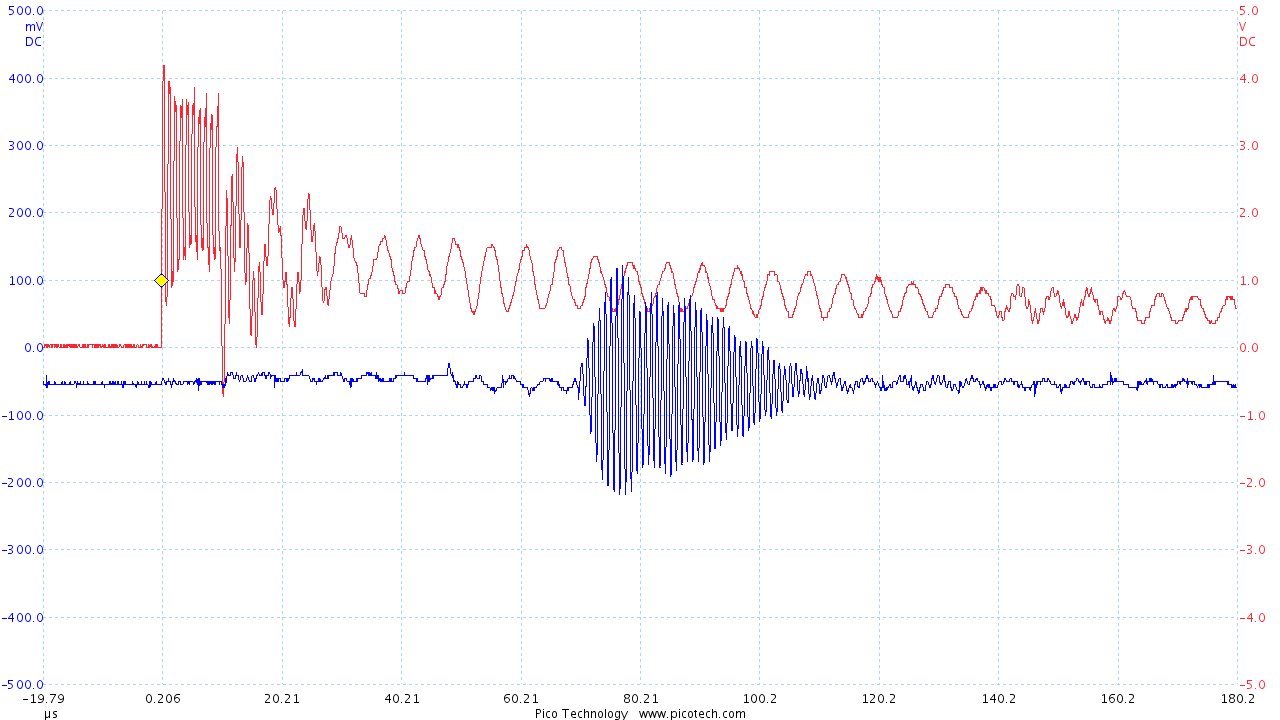
In the next experiment, blue is connected to START and red is connected to the otherwise unconnected sensor 2. Again, the transmitted signal can be seen arriving at sensor 2 ~ 70 us after START.
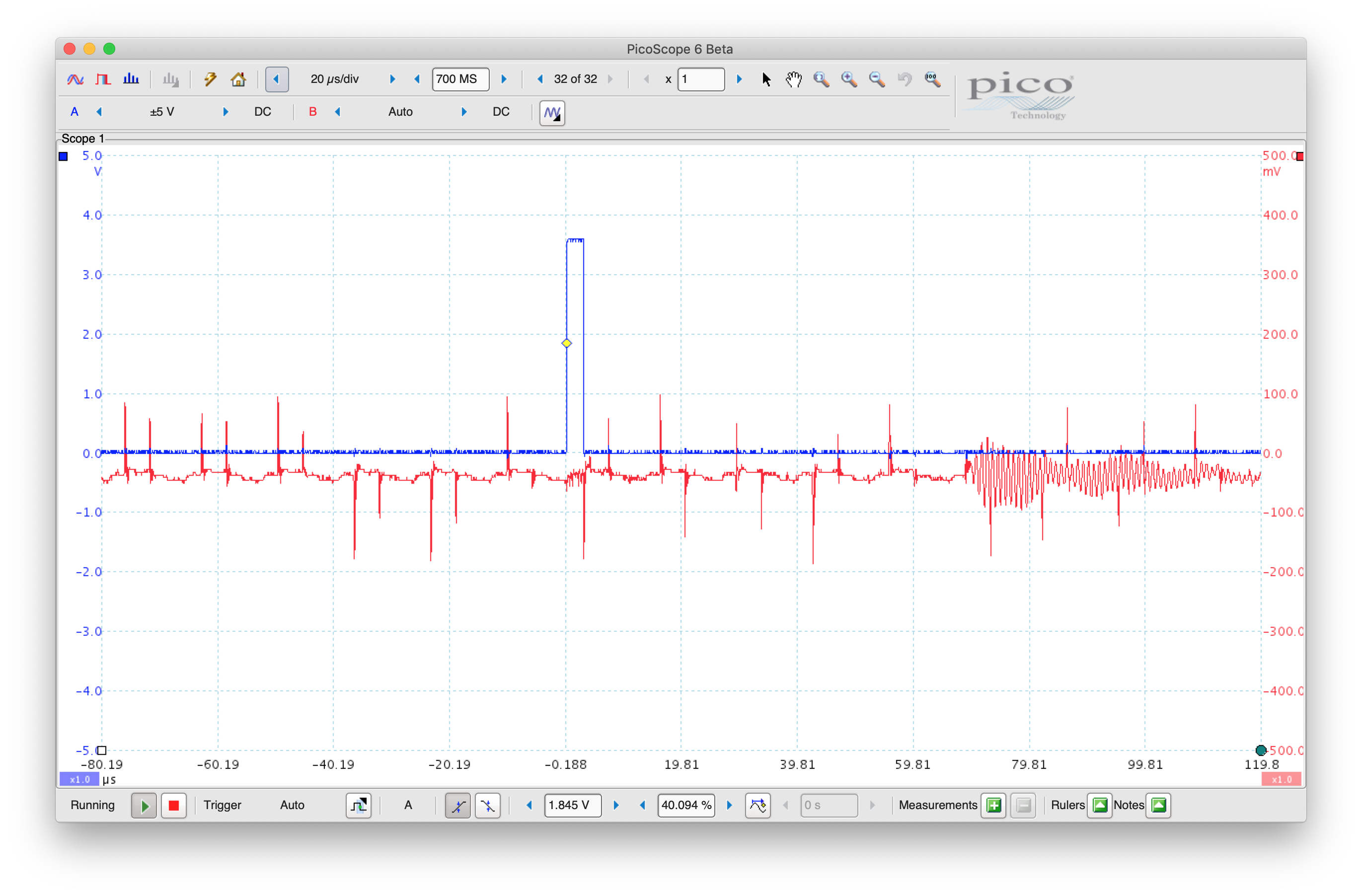
Below is the same test, but sensor 2 has been connected to TX2 and GND. The wavefront can still be seen arriving ~70 us after START, but now we see the ~160 kHz ringing coupled from TX1 onto TX2. Because of the scope trace above, I do NOT believe that this is acoustic coupling between the sensors, but rather some sort of electronic coupling on the TDC1000-C2000EVM board.