


Hi All,
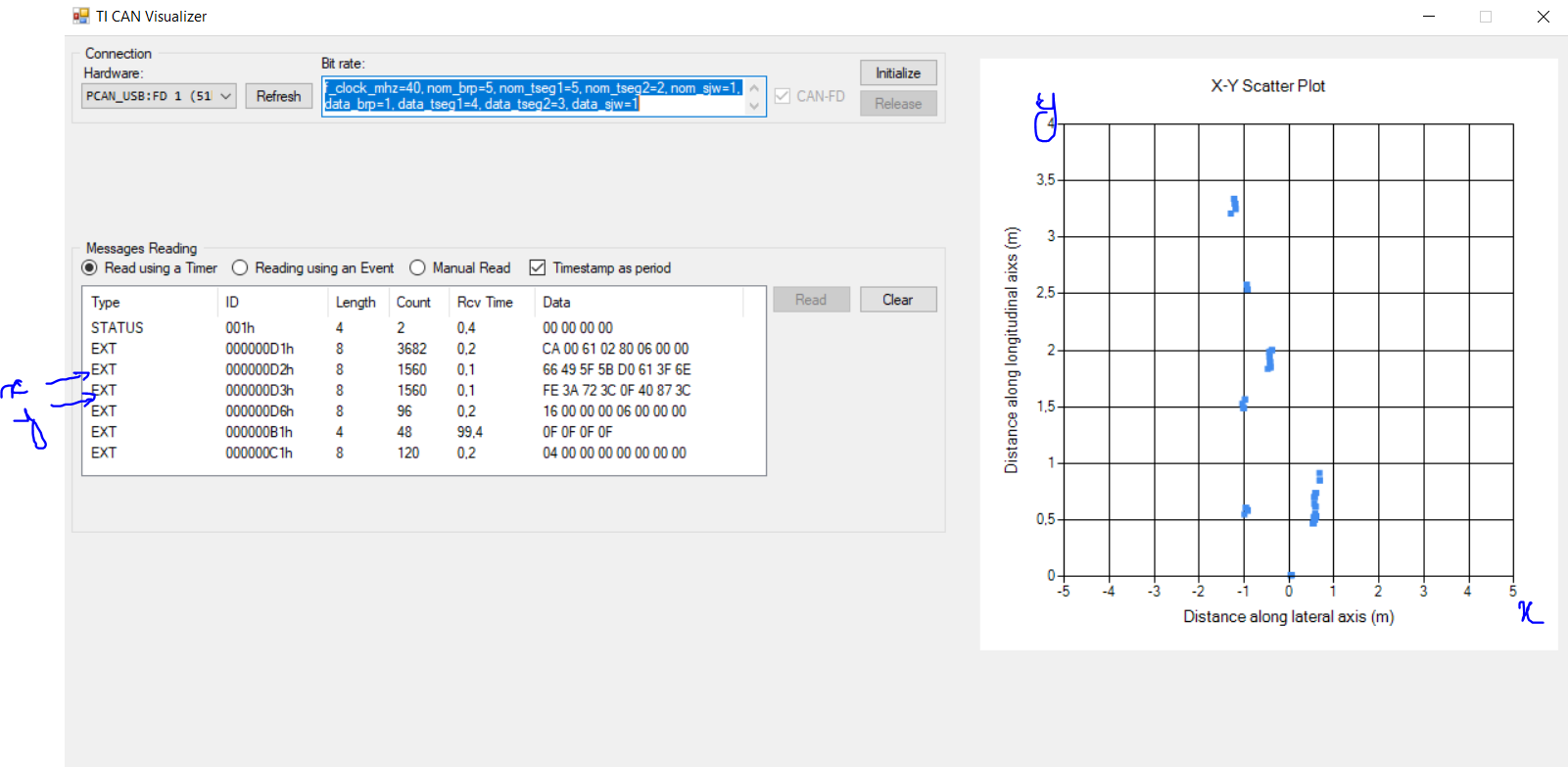
I'm using awr1642 boost Rev B, I'm actually testing object detection over CAN lab, On th MMWAVECANVISUALIZER app, there's message reading and (x,y) plot. I would like to plot Range-Doppler heat map instead of (x,y) plot. Also I have some questions :
- How to interpret (understand) messages reading ? what do they present?
- Does awr1642boost send only (x,y) over CAN bus (I need targets velocities (doppler))?
Thank you
