Hello;
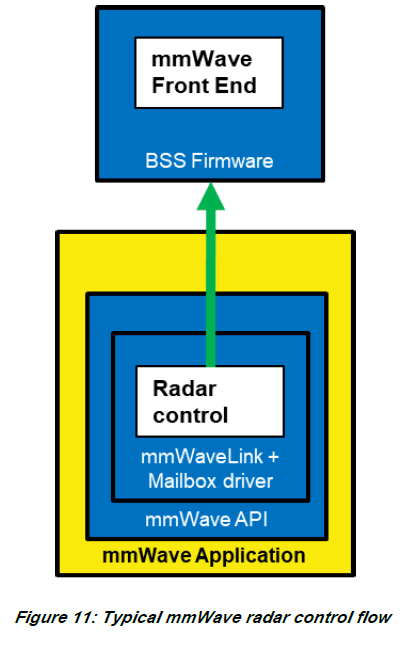
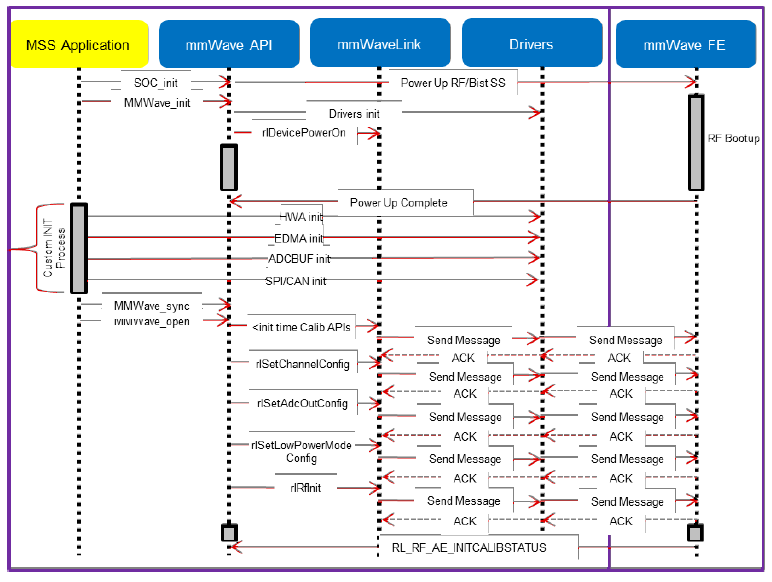
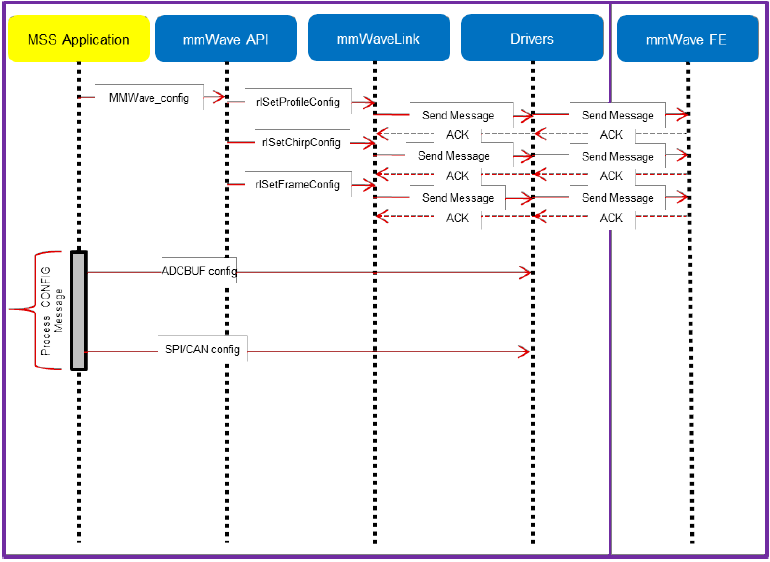
I am working on the code "mmwave_sdk_68xx_aop_hwa".Detected objects sometimes shows bounce. sometimes I don't get the right printouts. And in rare cases, update times may be delayed. I started to examine the sample code. I could not clearly find out where the chirp modulation signal is generated and how the receive signal is evaluated. "mmwdemo_rfparser.c" library, I can evaluate variables and contents according to antenna geometry. However, I could not find the chrip signal generated according to the frequency range.
Maybe a little detailed question, but can you help?
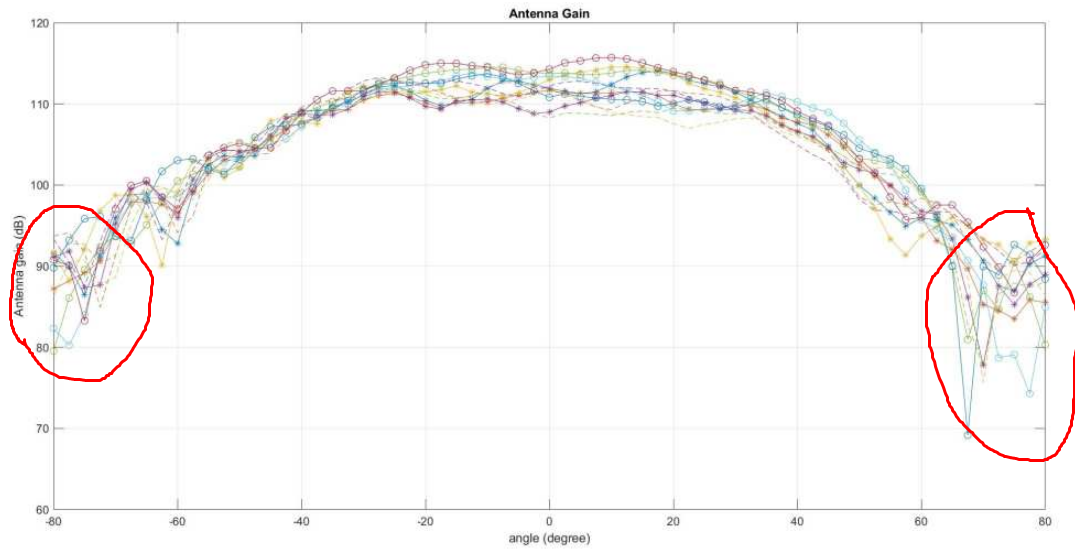
Below are some images from the Debug screen.
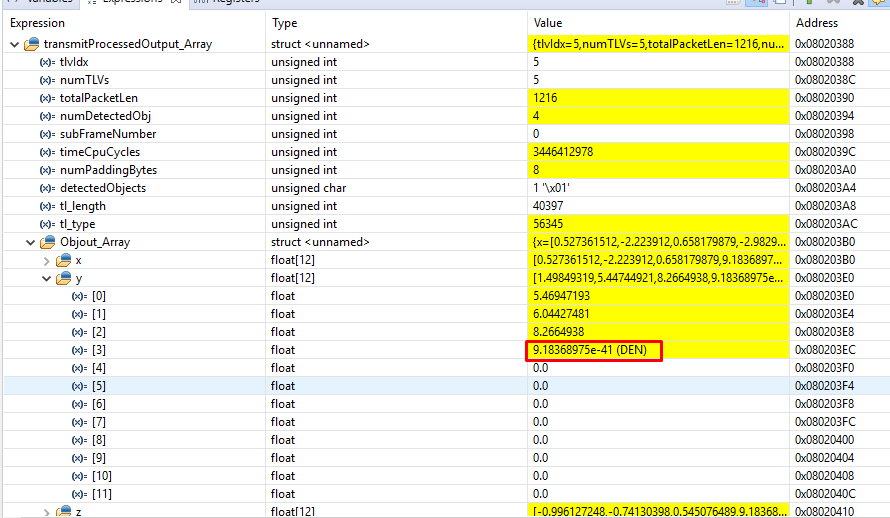
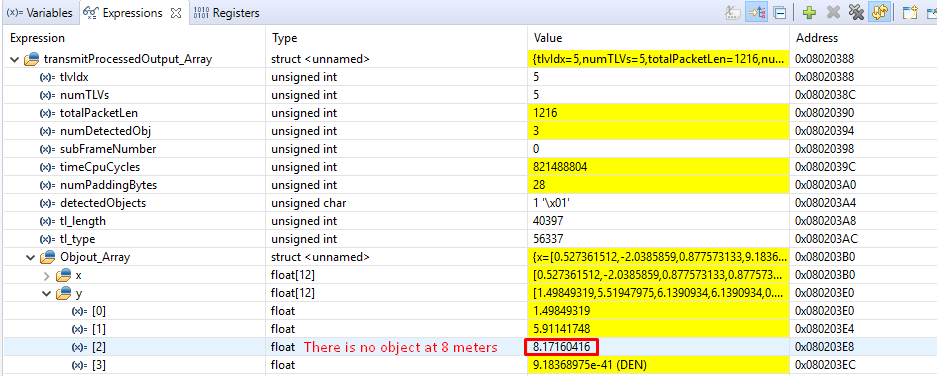
The configuration is below the screen.

Sincelery