


Hello ,
Automotive toolbox version 2.7.1 (latest)
OS : Windows
I was running 'Obstacle Detection' Lab on my AWR1642ODS EVM. I saw frequent ghost detections when an obstacle was at an azimuth angle less than 30 degrees , or greater than -30 degrees( 0 degree is along y axis).
Here is an example .
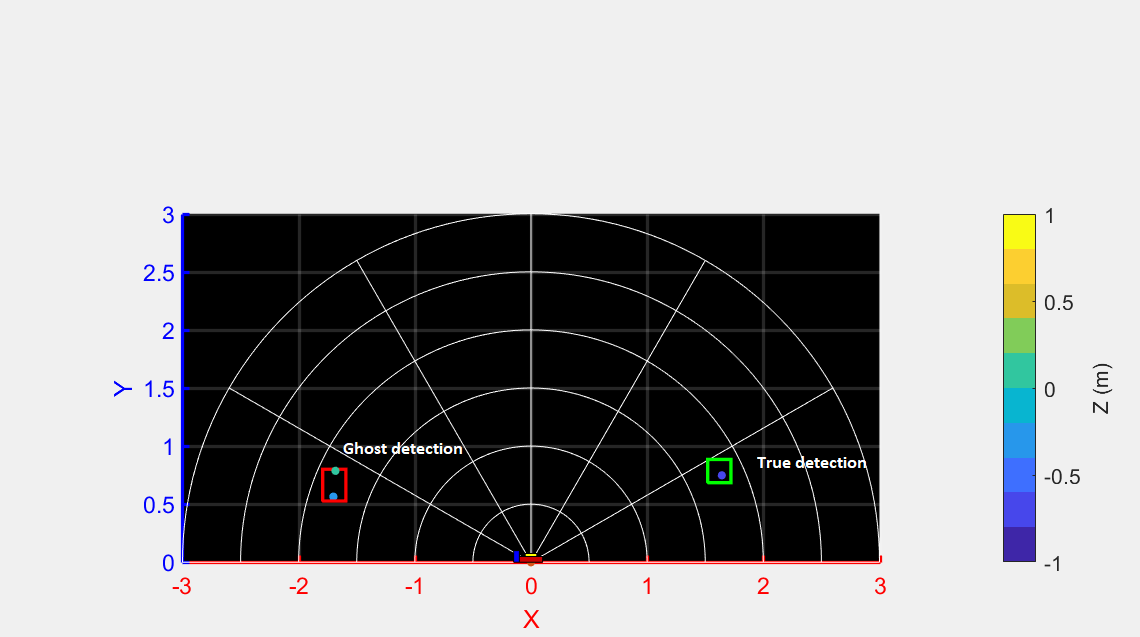
Here is a picture of the top down view. There are no other objects within 3m radius of the awr sensor.
The object is located at the position of green box at about 30 degrees. I observed frequent ghost detections at same range and approx angle -30.(0 degree is along y axis).
The ghost detections are usually mirrored, ie they occur at same angle mirrored on y axis.
What might be the reason for this observation ?
Thanks ,
Pranav.
