Other Parts Discussed in Thread: AWR1642BOOST-ODS, AWR1843
Hallo All,
Currently I am using AWR1843Boost along with obstacle detection example. I could see the data with the ods_3d_visualizer demo GUI. I would like to read the data using external microcontroller.
In order to do that I shorted R166 and R169 resistors.
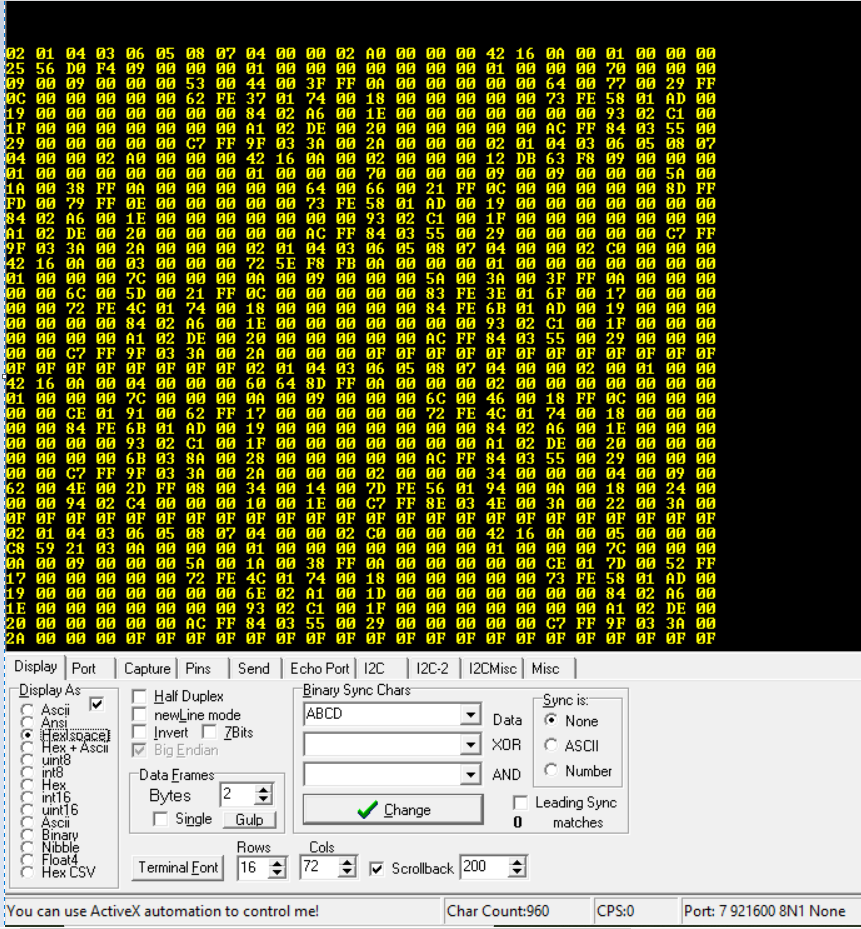
I can see the objects in the GUI. I am trying to read the data (Real term application with baud rate of 921600) using MSS LOGGER port, but I did not really short R26, Instead I am trying to read data from R26 itself. I can see the data as some hex numbers.
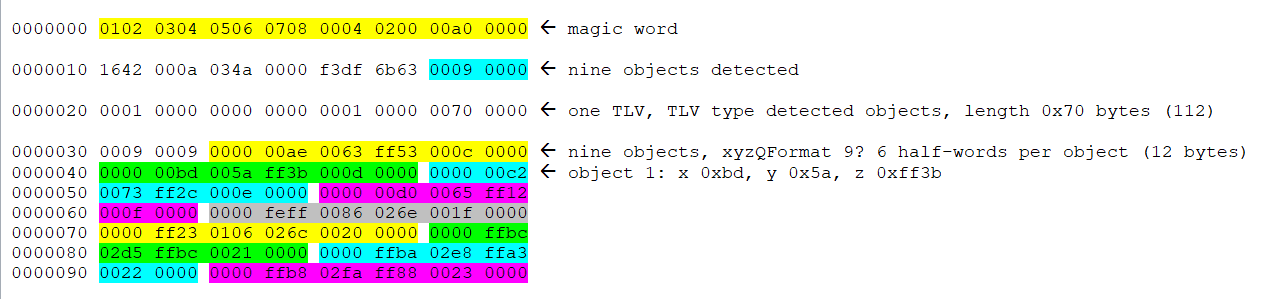
I am using gui Monitor Configuration as 1 1 0 0, with this configuration I should get data like FRAME Header + TLV (Detected Objects) + TLV (Clusters) .
But when I am trying to analyse it does not look the same. Please find the attached file.
Is MSS LOGGER is the correct port to read the data?
How Can I really use this data? Like I want the exact position of an object, How Can I get that position from the above data?
BR
Venkatesh.