



Other Parts Discussed in Thread: PGA460
Hi Akeem,
We are testing the product and some customers have reported that the sensor is oscillating the distance value when the obstacle is near. As we use the closed type sensor, I know that detection for distances less than 30cm is complicated, would there be any way to solve this distance value variation when the obstacle is near (<30cm)? Doing some tests here on the bench, I identified the following situation:
1 - Obstacle is physically at 70cm:

2 - Obstacle is physically 30cm:
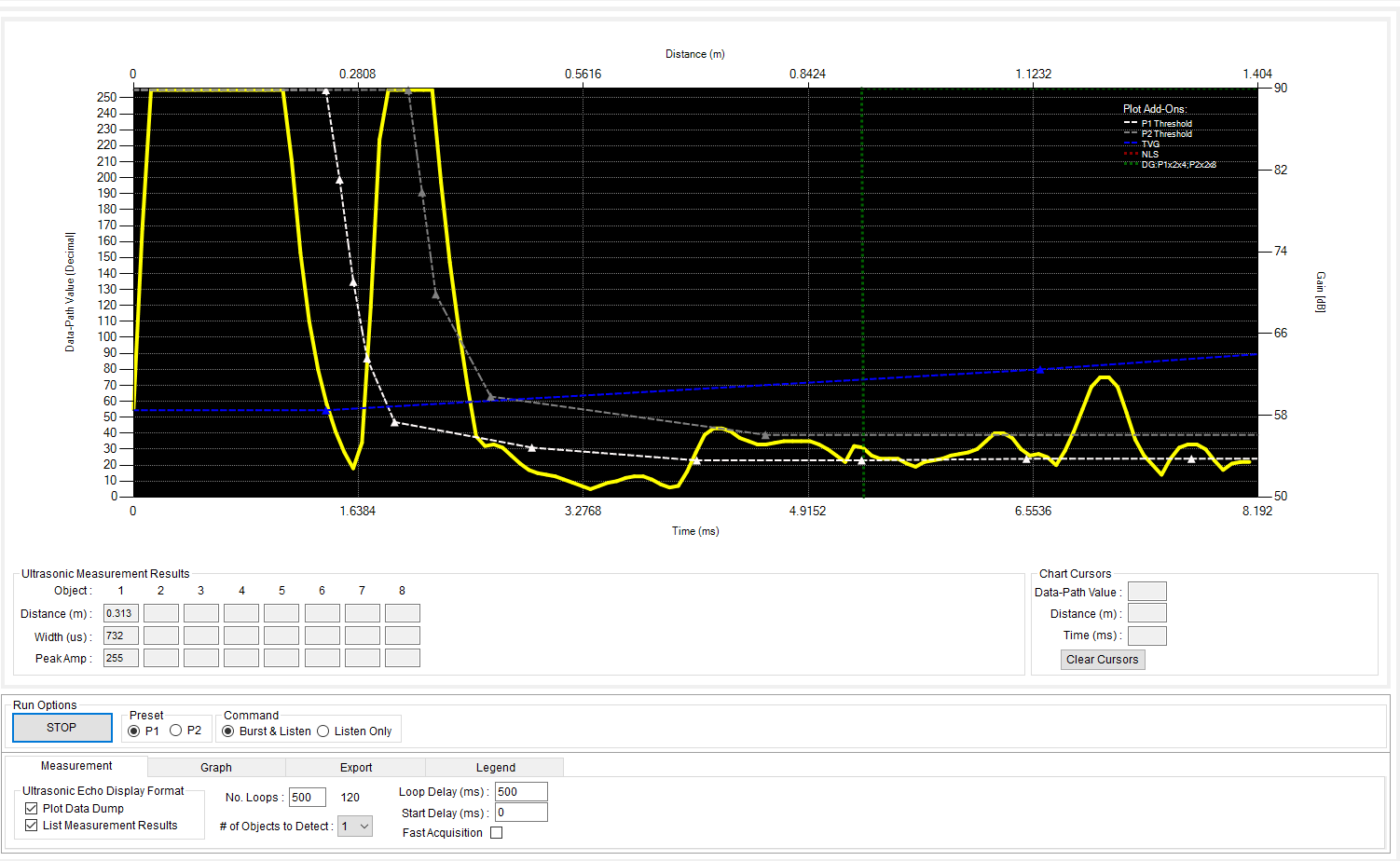
3 - Obstacle is physically at 20cm:

Note that in this case the distance begins to vary (is reporting >80cm).
