Tool/software: Code Composer Studio
Hello
I`m using FDC 2214 board for my stretchable sensor system.
Now I`m using this board with Arduino with open source code.
(IIR filtered digitizing code.)
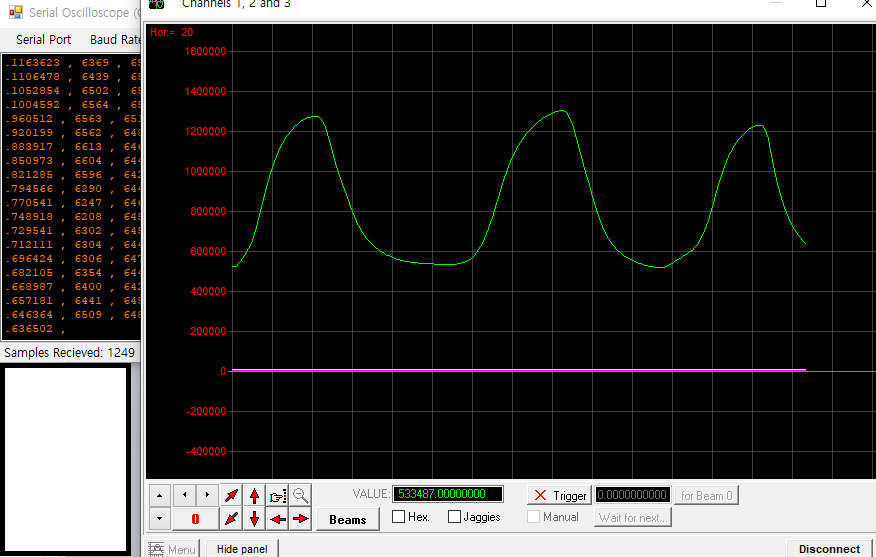
However, sometimes it shows me negative digitized value.
If this value is from the ratio (f_sensor/f_ref), it should not be negative, but it does.
Is this natural or am I misunderstood?
+Additional question)
I know that sensor frequency is represented as 1/2*pi*sqrt(L*C).
That means, if C is increased, then should sensor frequency decreased. Right?
I always have been observed that digitized value is increasing my stretchable sensor is extended.
However, this maybe contradiction that increasing of capacitance may cause decrease of sensor frequency.
Am I misunderstood? I would very thank you for answering my questions.