Other Parts Discussed in Thread: TIDEP-0092
Hi,
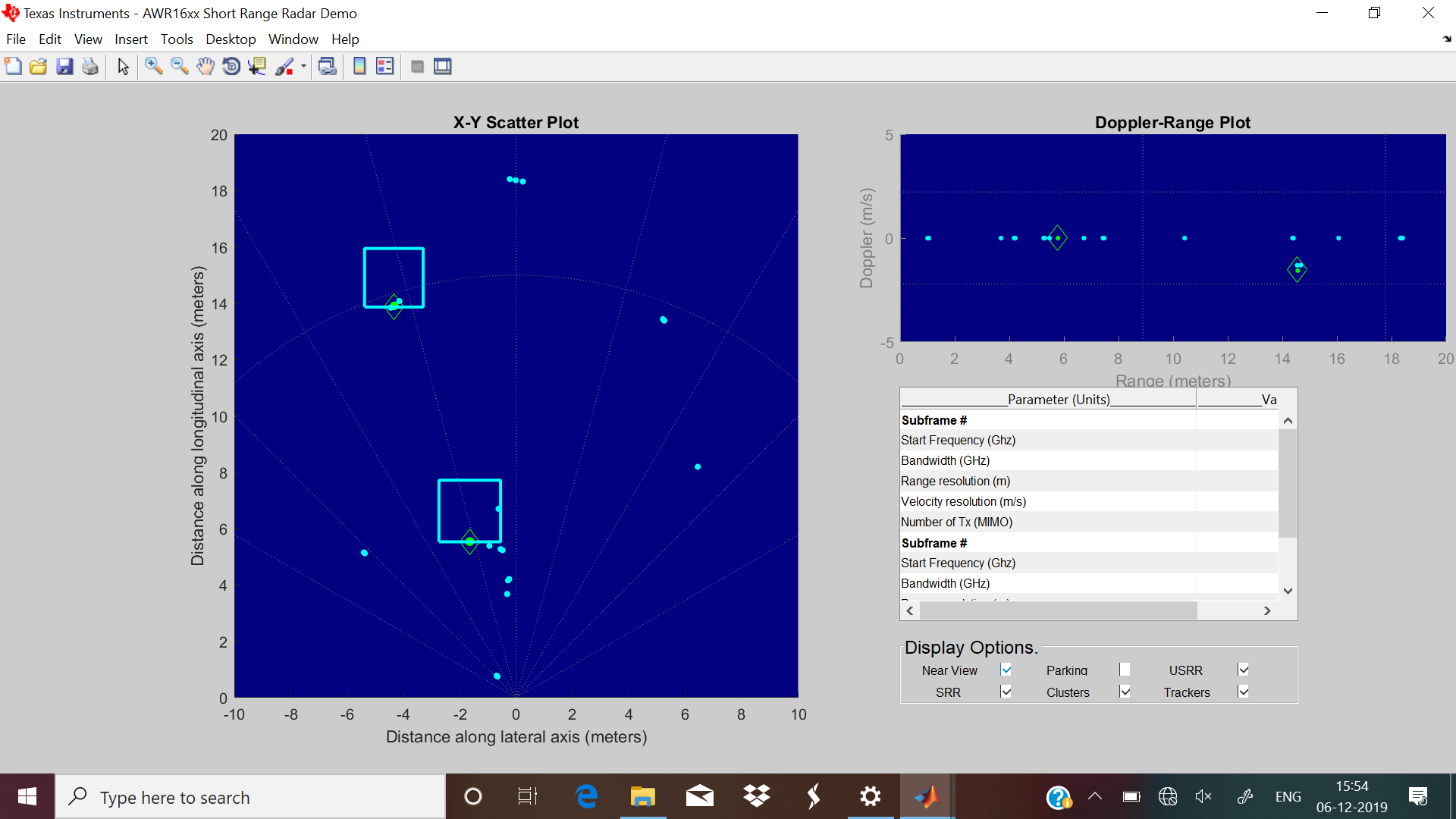
I was referring TIDEP-0092 : Short range radar(SRR) reference design which says that it has a FoV of 120 degree.
I would like to know if there is a dead zone within this FoV?
Regards,
Divya Harikumar
Hi,
I was referring TIDEP-0092 : Short range radar(SRR) reference design which says that it has a FoV of 120 degree.
I would like to know if there is a dead zone within this FoV?
Regards,
Divya Harikumar